Der D-Term Notch Filter kann genutzt werden um Noise, der durch schwingende Anbauteile wie Go-Pros oder Antennen erzeugt wird herauszufiltern. Eine Fehlersuche und Abstellen des Baufehlers ist immer zu bevorzugen. Manchmal ist der Baufehler aber schwer zu finden oder es gibt andere Gründe weshalb man diesen Kompromiss nicht eingehen möchte. Die Schwingung ist auf der Gyroskopebene meist klein und nicht relevant. Oft kümmert sich der Gyro Dynamic Notch Filter gut um das Problem, sodass Oszillationen beim P-Term nicht relevant werden. Da der D-Term Oszillationen mit nur geringer Amplitude stark vergrößern kann macht es dann Sinn das Frequenzband gezielt mit einem schmalbandigem Notch Filter auszuschalten. Natürlich kostet das Delay, aber besser als per Slider die Filterung zu erhöhen (Slider runter), das würde viel mehr Delay erzeugen. Vorgehen:
Erstellt eine Parula Heatmap und schaut an welcher untersten Frequenz das Noiseband beginnt. Dies ist der cutoff, nehmt den Cutoff zur Sicherheit 10Hz tiefer. Schaut nun bei welcher Frequenz die der Mitte des Noisebandes liegt. Dies kann mit dem kleinen Auswahlwerkzeug geschehen. Dies ist die center-Frequenz. Hier ein Beispiel:
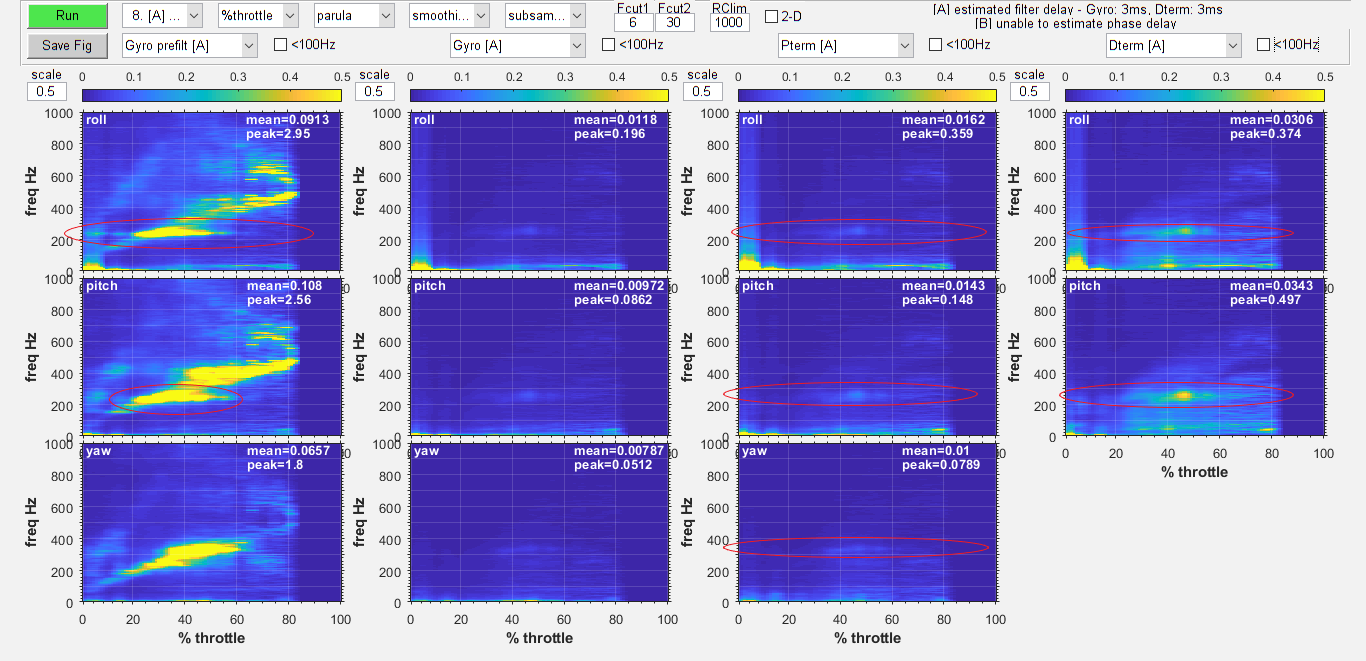
Zu sehen ist hier eine annähernd durchgängige gelbe Linie. Die Schwingung ist zwar drehzahl-abhängig verschieden stark ausgeprägt (erst weniger, dann mehr, dann wieder weniger gelb in der Heat Map) (Amplitude, also Höhe der Wellen in der Blackbox) haben aber immer die gleiche Frequenz (horizontale Linie in der Heat Map) (Abstand der Wellen in der Blackbox gleich). Würde die Linie in der Heat Map ansteigen aber nicht Teil der Motor-Störbänder sein, dann würde eine Drehzahlabhängige Schwingung vorliegen. In der Blackbox werden die Wellenabstände bei höherer Motordrehzahl kleiner. Zu suchen wäre die Störung an allem was sich dreht (Motorglocke, Propeller, Propellermutter). In diesem Fall hilft der D-Term Notch Filter nicht!
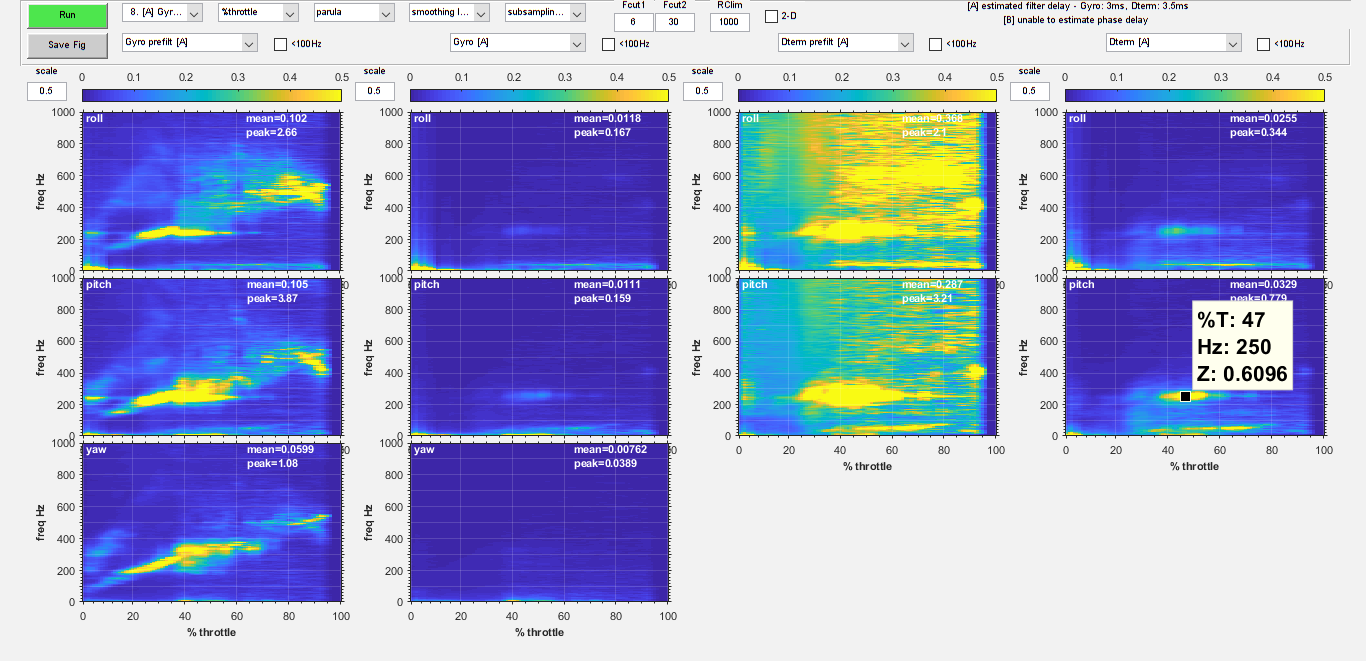
Hier noch ein Beispiel. Die schräge gelbe Linie (gut zu sehen bei Gyro prefiltered Yaw) ist das erste Motor-Störband (1st harmonic), die 2nd harmonic sieht man als hellblaue Wolke angedeutet. Verringert das Scaling auf z.B. 0.2 und die Färbung wird intensiver.
Die horizontale Linie sieht man bei Gyro prefiltered vielleicht erst auf den 2. Blick, aber schaut wie deutlich der D-Term das verstärkt und wie viel gerade auf Pitch durchschlägt. Nutzt das Analyse-Werkzeug um euch die Frequenz (Hz) anzeigen zu lassen. Sucht die Mitte (center) und den untersten Rand der Schwingung (cutoff). Vom cutoff ziehen wir nochmal 10 Hz ab, da der Notch am Rand schwächer filtert. Center: 250Hz, cutoff: 200Hz
Bemerkung: die dicken vertikalen ausgewaschenen Streifen zeigen, dass in gewissen Throttlebereichen zu wenig Daten aufgezeichnet wurden. Auch fehlt die typische Prop-Wash-Bubble [s. Heat Map oben]. Hier ist kein guter Tuning-Flug geflogen worden. Macht aber für spezielle Anwendungen Sinn. Wenn Ihr euren Quadcopter für einen bestimmten Einsatzzweck baut, dann kann man die Tuning-Flüge auch diesen Einsatzzweck nachfliegen lassen und genau daraufhin tunen.
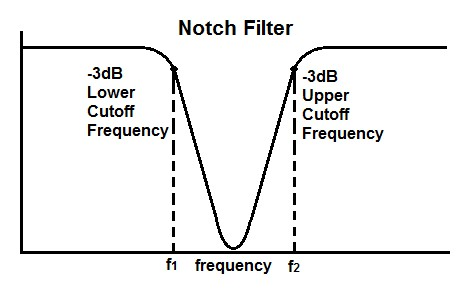
Der Notchfilter wird am stärksten in der Mitte filtern und am „Rand“ nahe des cutoffs weniger. Das Delay ist zwar vorhanden, aber im Vergleich zu anderen Filtern gering. Es ist besser einen gezielten Notch einzusetzen als das allgemeine D-Term-Filtering zu erhöhen. Lowpass Filter haben deutlich mehr Delay und sind weniger effizient.