Die Auswahl eines guten Frames ist eine der wichtigsten und einflussreichsten Entscheidungen auf das Flugverhalten. Oftmals ist es den Menschen nicht klar welch großen Einfluss der Frame hat. Natürlich geht es erstmal darum, dass der Frame alle Komponenten trägt die ihr verbauen möchtet. Je leichter ein Frame ist, desto weniger Material ist dran und desto eher wird der Frame im Rahmen eines Crashes kaputt gehen. Desweiteren steigt die Gefahr für Resonanzen, welche schwierig zu filtern sind, da leichte Frames meist weniger steif sind. Euren gewünschten Sweet Spot in diesem Dreiecksverhältnis müsst Ihr selbst finden.
Material #
Kohlefaserverstärkter Kunststoff, kurz „Carbon“, ist das am meisten gewählte Material, da es den besten Mix aus Leichtigkeit, Steifheit und Stabilität bietet. Immermal wieder kommen andere Materialien wie Metalllegierungen (Titan) oder Plastikmischungen ins Gespräch. Für einzelne Anwendungszwecke kann dies interessant sein, im Allgemeinen überwiegen jedoch oft die Nachteile. Metallrahmen, auch Titan, sind meist nicht steif genug. Um die nötige Steifheit zu generieren muss so viel Material verbaut werden, dass diese deutliche schwerer als Carbonvarianten werden. Plastikrahmen versuchen immer mal wieder Ihr Glück, sind jedoch nie so steif wie Carbonrahmen und benötigen letztendlich mehr Filterung als Carbonrahmen. Daher ist die Performance meist schlechter als ein baugleicher Quadcopter mit Carbonrahmen, wenn auch deutlich crashresistenter. Tuningbeispiel hier.
Armdesign #
Die Anordnung der Arme beschreibt die Position der Motoren im Verhältnis zum Körper „Body“ des Quadcopters. Beim Body liegt der Schwerpunkt. Mit dem Verhältnis Arme zu Body wird die Hebelwirkung der Motoren am Quadcopterbody festgelegt. Dies legt grundlegende Flugeigenschaften fest. Die simpelste Variante ist das True X Design.
True X #
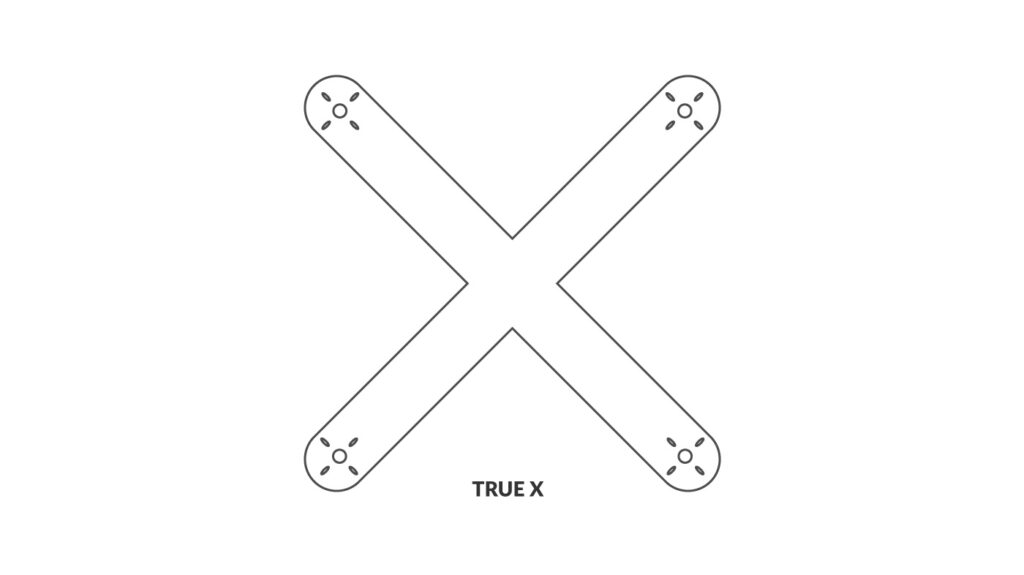
True X bietet eine symmetrische Form und damit grundsätzlich symmetrisches Verhalten von Pitch und Roll. Der Unterschied ist hier „nur“ noch durch die Anordnung der elektronischen Komponenten und der Batterie bedingt. Daher ist auch auf True-X Frames meist die Pitch Achse sensibler als die Roll-Achse. Es ist das am meisten verwendete Design.
Wide X #
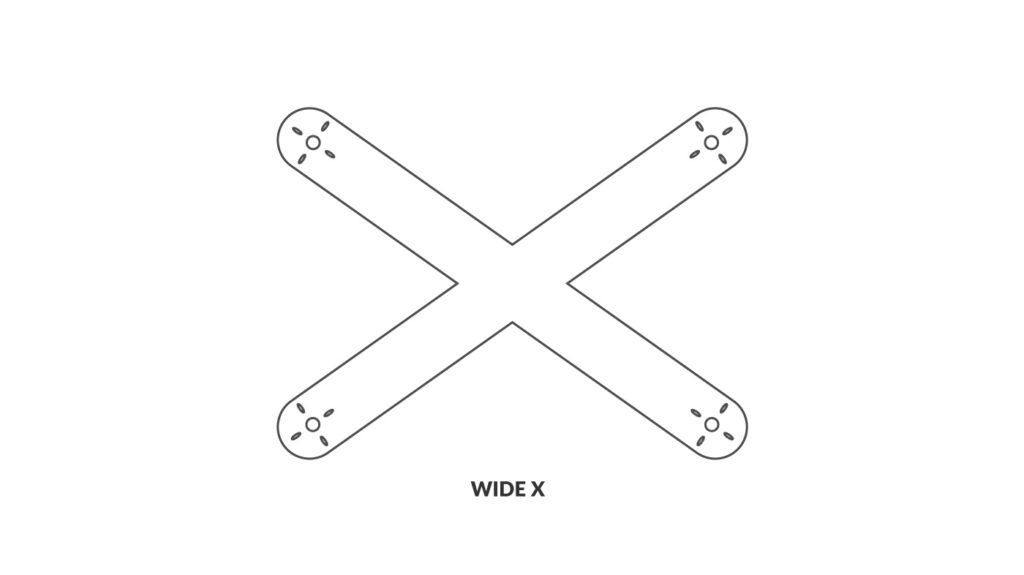
Mit entlang der Pitch-Achse angeordneter Elektronikkomponenten bietet dieses Armdesign am ehesten eine wirklich neutrale Gewichtsverteilung. Daher ist dieses Design, wenn auch sehr selten verwendet, bei LOS (Line of Sight) Acrobatic-Piloten beliebt.
Streched X #
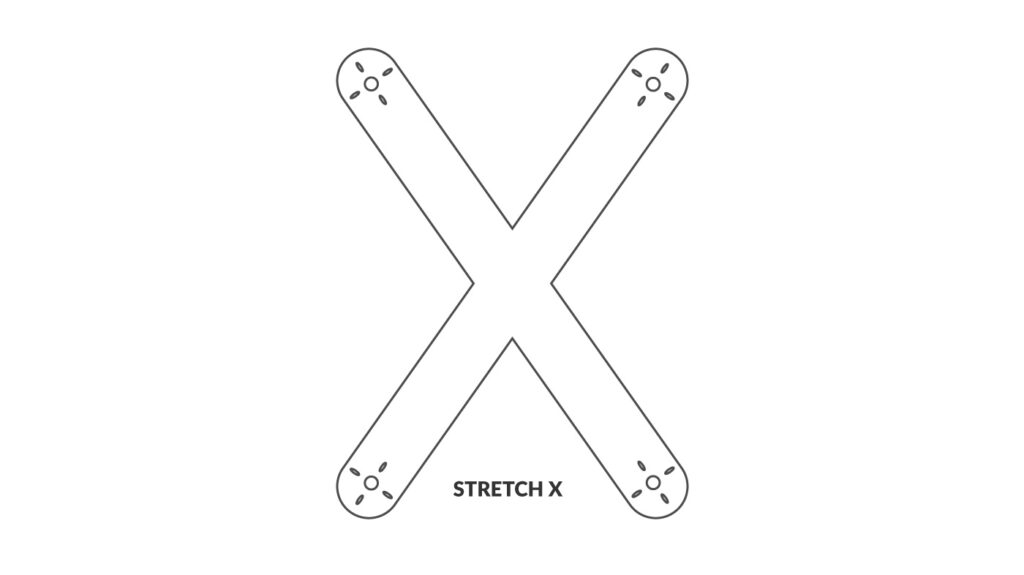
Da die Elektronikkomponenten meist entlang der Pitch-Achse angeordnet sind, wird diese sensibler für Stickeingaben als die Roll Achse. Um diesem entgegen zu wirken wird das streched X Design verwendet. Um zu Beschleunigen wird der Quadcopter leicht nach vorn gepitcht. Kleinste Änderungen im Pitch-Winkel bedingen eine große Änderung der geflogenen Geschwindigkeit, wenn man die gleiche Höhe halten will (Racing-Situation). Durch die Verlängerung des Frames in Richtung Pitch wird hier etwas „Auflösung“ gewonnen und die Geschwindigkeit ist besser dosierbar. Daher wird für Racer ein streched X Design empfohlen. Ausführliche Argumentation für das streched X Design bei Frames könnt ihr hier nachlesen.
Deadcat #
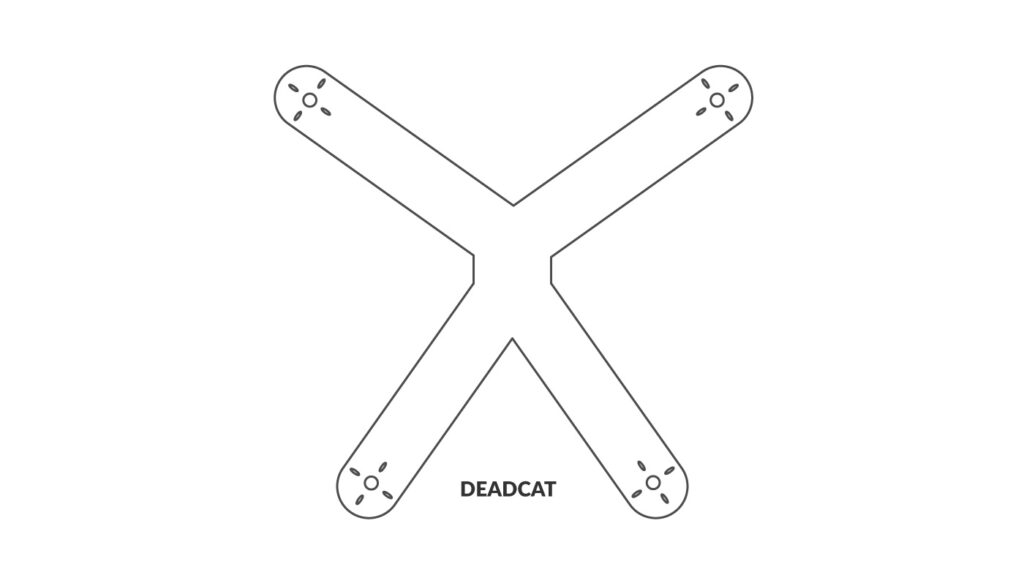
Bei vielen Frames sind die Propeller im FPV Videobild. Cinematische Flieger stört das. Daher gibt es ein Design bei dem die vorderen Arme etwas zur Seite gedrückt werden. In der Aufsicht schaut dies wie eine überfahrene Katze aus, daher der Name Deadcat Design. Von der Performance Seite hat dieser Frametyp keine Vorteile, was cinematische Flieger nicht stört. Roll ist etwas asymetrisch und neigt zum nach hinten pitchen, was ausgeglichen werden muss. Daran kann man sich gewöhnen.
Z-Design, Multilevel #
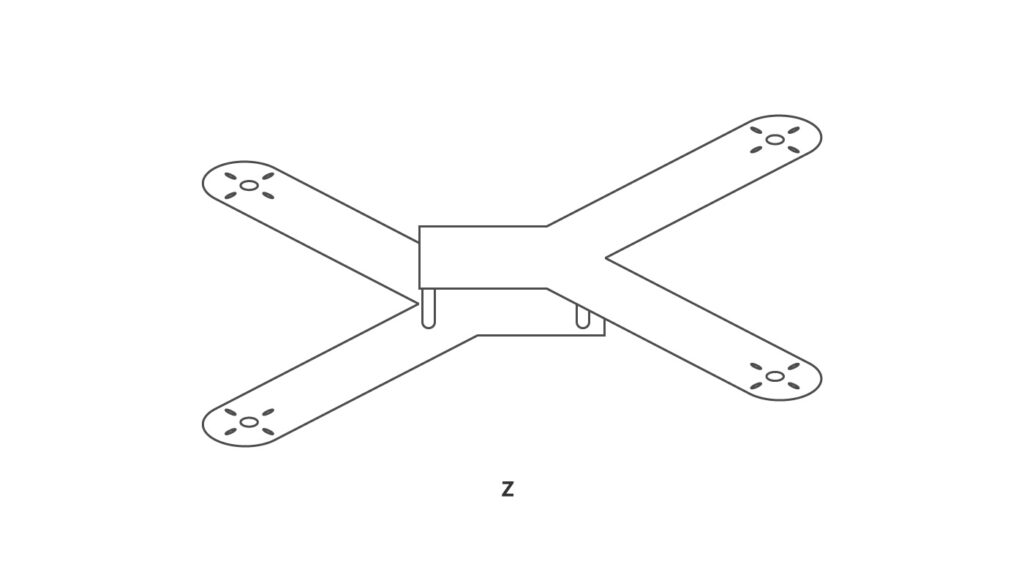
Die hinteren Motoren sind leicht erhöht gegenüber den vorderen Motoren angebracht. Bei leicht nach vorn gepitchtem Flug sind diese in einer Kurve weniger turbulenter Luft von den vorderen Motoren ausgesetzt. Dies erzeugt weniger Propwash an den hinteren Motoren in einer Kurve. Daher wird dies gern bei Racern eingesetzt. Ein ähnlicher Effekt wird bei Hybrid-Designs verwendet.
Hybrid #
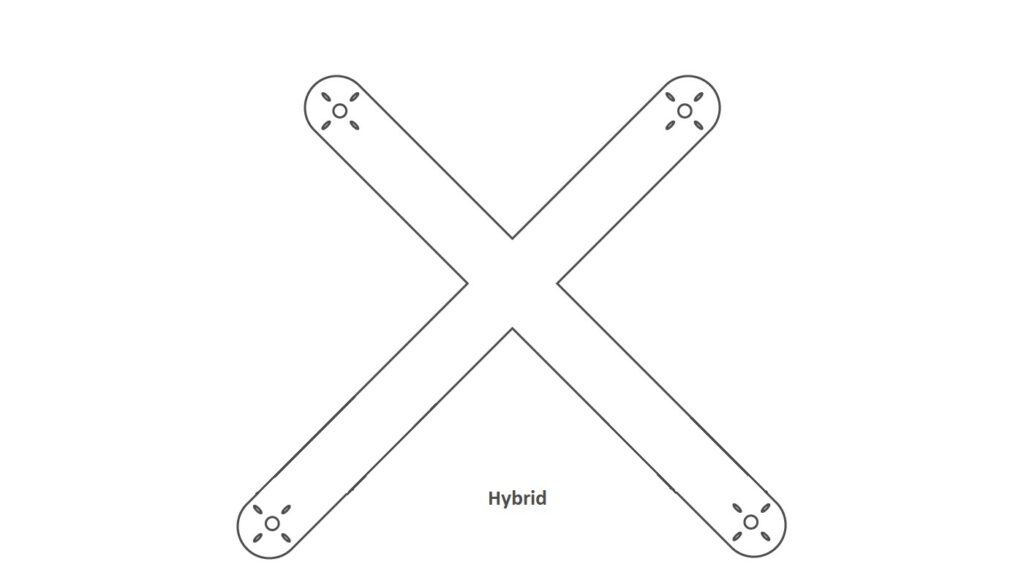
Nutzt hinten längere Arme als vorn. Der gewünschte Effekt ist ähnlich dem des Z-Designs. Die hinteren Motoren sollen weniger der turbulenten Luft der vorderen Motoren ausgesetzt sein. Typische Beispiele sind ein Body mit 5 Zoll Armen vorn und 6 Zoll Armen hinten. Wichtig: es werden in diesem Beispiel auch hinten 5 Zoll Propeller aufgezogen, nicht 6 Zoll. Dieses Design kann auch mit dem Z-Design kombiniert werden um den Effekt zu verstärken.
Boxed Frames #
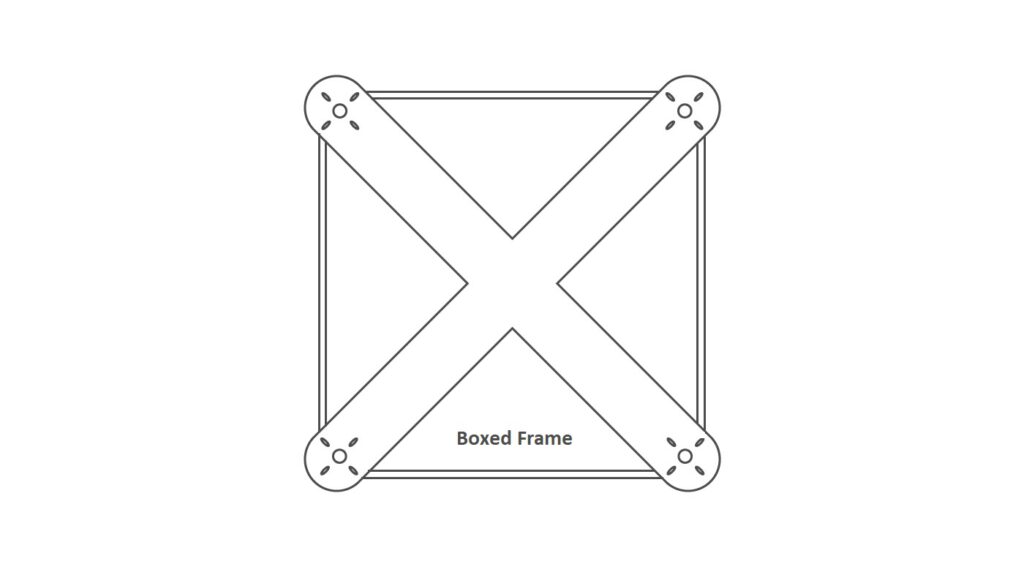
Um Steifheit im Frame zu etablieren können Braces (Verbindungen zwischen zwei Motoren) angebracht werden. Meist wird eine Brace oder zwei Braces vorn und hinten oder rechts und links angebracht. Der Maximalausbau sind vier Braces. Frames die dies von Anfang an als integralen Bestandteil nutzen werden als Boxed-Frames bezeichnet. Meist sind die Braces in diesen Fällen vertikal angebrachte Carbonstreben. Vom Resonanzsprektrum her sind diese Frames von Vorteil.
Unibody vs einzelne Arme #
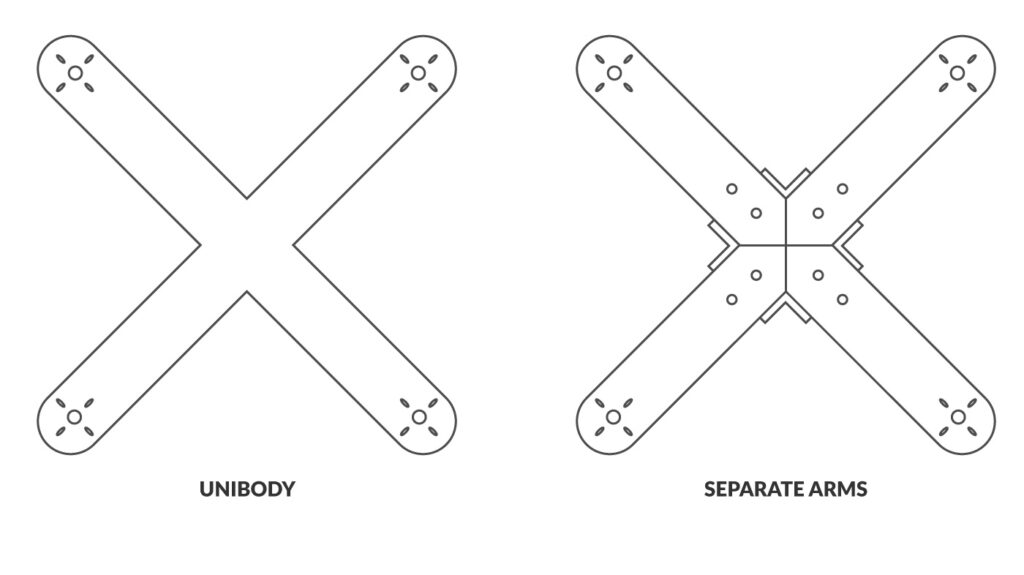
Kauft keine Unibody Frames. Einzelne Arme sind immer von Vorteil: Nach einem Crash mit Armbruch muss nur ein Arm getauscht werden, statt dem „ganzen“ Frame. Des Weiteren sind diese Arme günstiger herzustellen. Das Unibody Design überträgt auch Resonanzen meist stärker, da alle Arme stark aneinander gekoppelt sind. Verschraubungen und Klemmen erzeugt zwar Stabilität, lässt aber immer Raum für etwas Spiel, was ein Stück weit entkoppelt und Resonanzen senkt.
Batterieposition #
Als schwerstes Bauteil hat die Position der Batterie erheblichen Einfluss auf den Schwerpunkt des Quadcopters. Eine Fehlpositionierte Batterie kann zu unerwünscht asymmetrischem Flugverhalten führen. Im Idealfall sollte die Batterie so positioniert sein, dass der Schwerpunkt mittig über oder unter dem Kreuzungspunkt der Motordiagonalen zum liegen kommt. So wird eine gleichmäßige Auslastung der Motoren und effiziente Ausschöpfung der Motorkraft gewährleistet. In Racing-Situationen ist die am häufigsten geflogene Position nicht die Ruheposition sondern 30-40° nach vorn gepitcht. Um hier etwas Last von den hinteren Motoren zu nehmen verschieben manche Racer durch umsetzen der Batterie nach vorn den Schwerpunkt etwas in Richtung vorderem Teil des Quadcopters. So neigt der Quadcopter eher diese Position zu halten und die hinteren Motoren haben mehr Freiraum für Drehmoment.
Grundsätzlich gibt es zwei typische Batteriepositionen:
Bottom-Mount Batterie #

Typischer Weise die von Racern bevorzugte Batterieposition. Verlagert den Schwerpunkt unterhalb die Rotorebene wodurch der Quadcopter stabiler der vorgegebenen Linie folgen kann. Nachteil: in Kurven zieht des den Quadcopter durch die Trägheit beim Lastwechsel etwas nach außen.
Top-Mount Batterie #
Freestyle-Piloten nutzen diese Position, da sie die Unterseite des Quadcopters frei benötigen um im Flug den Boden, Wände oder Decken während der Manöver berühren zu können. Meist ist der flugphysikalische Gedanke hier zweitrangig, aber der Schwerpunkt wird in die Nähe der Rotorebene verschoben. Hierdurch ist ein symmetrisches Verhalten von Pitch und Roll am ehesten gegeben, was für die HD-Aufnahmen von akrobatischen Manövern von Vorteil ist.
Problem: Anbauteile #
Actioncams #
Weitere Probleme sind schwingungsempfindliche Anbauteile wie GoPro-Mounts mit wenig physikalischer Verbindung zwischen GoPro und Frame. In dieser Beziehung sind Schaumstoffkeile oder Camera-Cages, welche die GoPro tragen gut (Armattan Chameleon TI). TPU Mounts, oder Mounts mit Einstellschraube (GoPro-Style Mount) sind denkbar schlecht.


Im Idealfall nutzt man natürlich gar keine GoPro, aber wer dies möchte sollte auf einen möglichst kurzen Abstand zwischen GrPro und Frame achten. Der Mount sollte möglichst steif sein und viel Material zwischen Mount und GoPro einsetzen. Auf einstellbare Mounts sollte man verzichten. Lieber 2-3 Mounts mit unterschiedlichen Winkeln besorgen, die man an- und abschraubt. So ist die Gefahr, dass die GoPro anfängt zu Schwingen am geringsten. Nicht nur kleben, sonst sucht ihr eure GoPro irgendwann auf der Wiese. Eine Weitere Möglichkeit ist das verwenden einer Naked GoPro oder Minikamera wie der Insta360Go2 oder ähnlich.
Wenn ihr Probleme mit Resonanzen habt, lasst die GoPro inkl. Mount einfach mal weg und schaut ob das Problem reduziert wird. Wenn ja, wisst ihr wo ihr ansetzen müsst.
Antennen #
Auch Antennen schwingen in der Luft und können Resonanzen erzeugen. Stab- oder Dipolantennen von Receivern machen meist keine Probleme. Problematisch sind eher polarisierte Antennen der VTX. Achtet auf einen festen Sitz und gegebenenfalls eine Führung der Antenne, damit diese so wenig wie möglich schwingen kann. Vermutet ihr die Antenne als Ursache so löst diese aus der Halterung und klettet sie zum testen mit dem Lipo-Strap an der Batterie fest. So kann man schnell testen ob die Antenne für einen Teil der Resonanz verantwortlich ist.
Frameresonanz #
Die meisten Schwingungen entstehen durch die Biegungen im Rahmen des Quadcopters selbst. Arme können typischer Weise bis zu 6mm auf und ab schwingen. Diese Schwingungen können sich zum Gyroskop übertragen und Fehlmessungen verursachen. Daher muss das Gyroskopsignal gefiltert werden. Je weniger Filterung wir anwenden müssen, desto kürzer die Latenz des Signals und desto besser die Flugeigenschaften des Quadcopters. Grundlage ist also ein schwingungsarmer Rahmen mit möglichst wenig Resonanzen.
Kaum ein Hersteller veröffentlicht zu seinen Frames ein Noiseprofil mit Frameresonanzen. Daher ist es vor einem Kauf sehr schwierig abzuschätzen ob ein Build mit einem bestimmten Frame leicht zu tunen sein wird oder nicht. Je weniger Material an einem Frame ist und je weniger Verstrebungen zwischen den Armen und Body des Quadcopters sind, desto mehr wird er mit Resonanzen zu kämpfen haben. Stichwort: lightweight 5 inch toothpick frame
Eine gute Visualisierung von Frameresonanzen hat Chris Rosser zusammengestellt:
Hinweise für Frameresonanzen #
Im täglichen Flugbetrieb bleiben Frameresonanzen meist unterschwellig. Effekte wie mid-throttle Oszillationen oder Jello auf der Kamera können ein Symptom von Frameresonanzen sein. Schaut hier aber zunächst auf andere typische Baufehler wie lose Kabel, schlechte Kamera-Mounts, lose Platinen in den Kameras, oder fehlendes Softmounting.
Frameresonanzen identifizieren #
Hier ein Beispiel zweier Racing-Frames mit hart eingestelltem Tune für Racing. Was bedeuten die gelben Felder? Schaut hier nochmal nach…
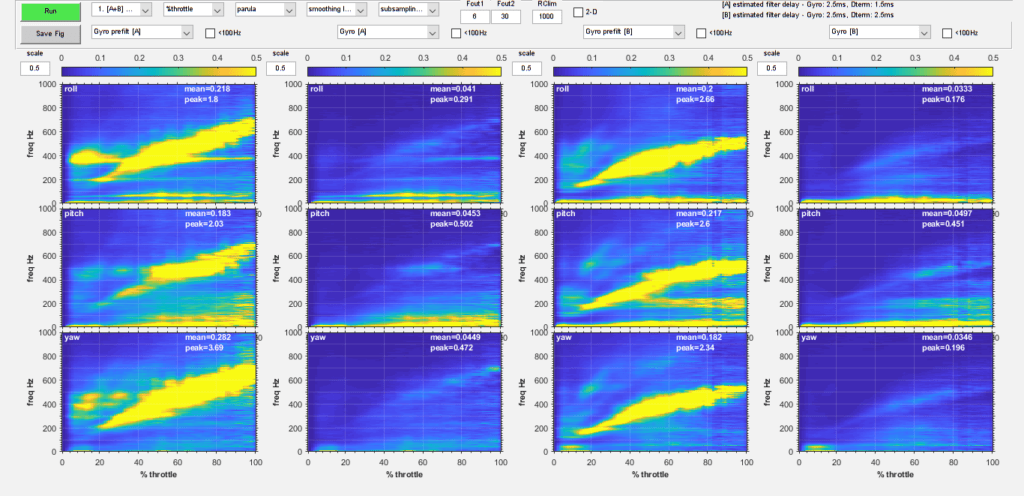
Schauen wir und die Spektralanalyse genau an, eingezeichnet sind die motordrehzahl unabhängigen Resonanzen. Diese kommen vom Frame oder den Anbauteilen.
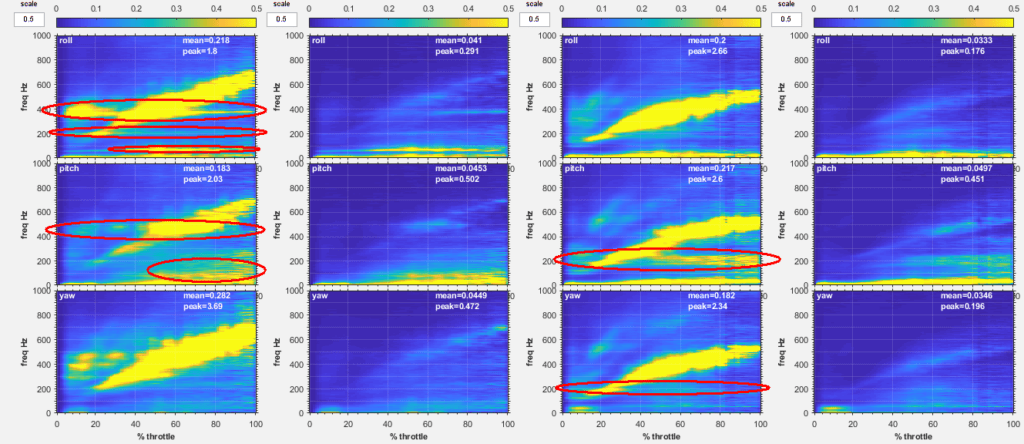
Beide Frames zeigen erhebliche Resonanzen. Um diese zu kontrollieren wird einiges an Filterung benötigt, was Delay erzeugt. Beide Frames kann man aus Performance-Sicht nicht empfehlen.
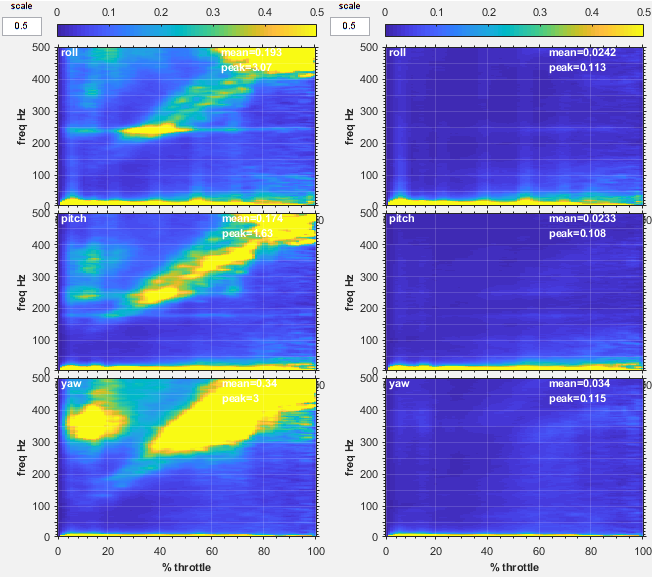
Dieser Frame zeigt (fast) keine relevante Resonanz und ist sehr sauber. Das Tuning ist dementsprechend einfach. Nachteil: es ist ein steifer Frame mit Braces (Verstrebungen) vorn und hinten mit Verschraubung zum Body, dies bedingt nicht unerheblich Gewicht. Es handelt sich um einen Freestyle Frame.
Je niedriger die Frequenz ist, bei der die Frameresonanz (horizontale Linie) auftritt, desto stärker ist der Effekt auf das Gyroskop und desto schlechter werden Gyroskop-Lowpass-Filter diese Resonanzen unterdrücken.
Je stärker gelb diese horizontalen Linien gefärbt (oder desto höher der Z-Wert ist) desto schwieriger wird die Unterdrückung mittels Filterung.
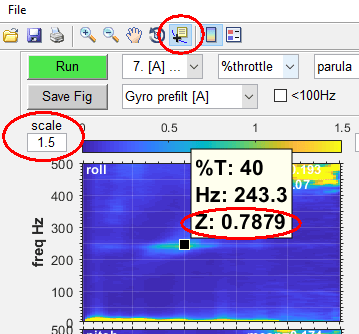
Um dies genau auszuarbeiten setzen wir den Scaling-Faktor hoch, bis wir die intensivste Gelbfärbung abgrenzen können. Anschließend messen wir hier den Z-Wert. Beachtet, wir reden die ganze Zeit vom Gyro prefiltered Signal (Blackbog Mode: gyro_scaled) – also den ungefilterten Gyroskop-Rohdaten.
Frameresonanzen minimieren #
Physikalisch Resonanz vor dem Tuning zu reduzieren ist immer besser als diese „wegzutunen“. Es ist das einfachste und beste einen Frame zu kaufen, welcher von Haus aus kaum Resonanzen aufweist. Da aber kaum ein Hersteller Resonanzprofile veröffentlicht ist eine Auswahl vor Kauf schwierig. Man kann natürlich den Frame wieder verkaufen. Eine weitere Möglichkeit sind Braces (Verstrebungen) anzuschrauben und zu schauen ob dadurch die Resonanzen von der Amplitude (Z-Wert) reduziert und/ oder im Spektrum nach oben (höhere Frequenz) verschoben werden. Dies wäre im Idealfall zu beobachten. Manche Frames bieten die Möglichkeit dickere Arme (6mm statt 4mm) oder Top-/ Bottomplates zu verbauen. Dies kann die Steifigkeit erhöhen und Resonanzen minimieren. Viel mehr kann man ohne grundsätzliche Änderung am Frame nicht machen. Es gibt abgefahrene Ansätze wie die Arme mit dickem Strick zu umwickeln und in Epoxidharz einzulegen oder Arme oder Plates zu doppeln und mit Sekundenkleber zu verkleben. Dies fällt aber mehr unter die Rubrik Bastelei und nicht sauberer Quadcopter-Aufbau, kann aber helfen.
Frameresonanzen „wegtunen“ #
Als Ansätze beim Tuning gibt es eine Reihe von Möglichkeiten. Die Reihenfolge stellt keine Wertung dar. Einen „besseren“ Frame kaufen ist zwar erste Wahl, aber wer soweit liest sucht sicher nach einer anderen Lösung:
Filtern mit dem Gyroskop dynamic Notch Filter #
Frameresonanzen werden am effizientesten durch den Gyroskop dynamic Notch Filter bekämpft. Sucht euch die höchste horizontale Linie. Der maximale Cutoff sollte leicht höher als diese liegen. Je höher der untere Cutoff liegt, desto weniger Delay wird erzeugt. Schiebt den unteren Cutoff aber nicht zu hoch. Verbogene Propeller sollen ebenfalls vom dynamic Notch mit erfasst werden und diese sind bei euren Testflügen mit unverbogenem Propellern gar nicht im Blackbox-Log erfasst. Der Q-Faktor beschreibt wie effizient und „breit“ der Notch die Resonanz unterdrückt. Der dynamische Notch wird immer der höchsten Amplitude in seinem Frequenzbereich hinterherjagen. Derzeit habt ihr nur einen. Mit Betaflight 4.3 wird es mehrere dynamic Notches geben.
Sollte der Dynamic Notch nicht ausreichen, weil es mehrere Resonanzen gibt, so kann der Lowpass-Filter helfen. Dieser zielt nicht genau auf die Frameresonanz, unterdrückt aber Noise im Allgemeinen. Je höher frequent die Frameresonanz ist und desto weiter der untere cutoff des Lowpass Filters von der Resonanz weg ist, desto stärker wird er die Resonanz unterdrücken. Dies erzeugt aber deutlich mehr Delay als der dynamic Notch und ist daher nur zweite Wahl.
PWM-Frequenz #
Die PWM Frequenz hat ebenfalls einen Einfluss auf den Grad der Sichtbarkeit der Frameresonanz im täglichen Flugbetrieb. Durch Änderung der PWM Frequenz in den ESC Einstellungen ändert sich zwar nichts am Vorhandensein der Resonanz, aber der Einfluss auf das Videobild und das Gyroskop kann durch Rückkopplungseffekte verstärkt oder abgeschwächt werden. Gedanke dahinter ist, dass der Motorlauf bei höherer PWM-Frequenz etwas ruhiger ist und weniger Schwingungen in den Frame geschickt werden, die an den Resonanzpunkten des Frames verstärkt werden können. Versucht also eine höhere PWM-Frequenz im ESC einzustellen und zu schauen ob dies eurem Problem hilft. Wenn ihr damit das Problem löst würde ich auch von dynamischer PWM-Frequenz (BLHeli_32 ab v32.8) abraten und die PWM-Frequenz, die gut läuft, fest einstellen.
Verzweiflungstaten #
Wer massive Resonanzprobleme hat, kann einen statischen Notch auf Gyroskop oder D-Term genau auf die horizontale Linie in der Parula heatmap legen. Eine weitere Möglichkeit ist den Lowpass-Filter von PT1 auf BiQuad zu stellen. Beides erzeugt viel Latenz, stellt also nur Notfalllösungen dar.
Wünsche #
Ich würde mir wünschen, dass alle Hersteller zu ihren Frames ein Noiseprofil veröffentlichen würden. So könnte man vor dem Kauf sehen auf was man sich einlässt. Zudem würde es die Qualität der verkauften Frames verbessern, da Hersteller über die Resonanz-Problematik intensiver nachdenken würden und „schlechte“ Frames erst gar nicht anbieten würden.