
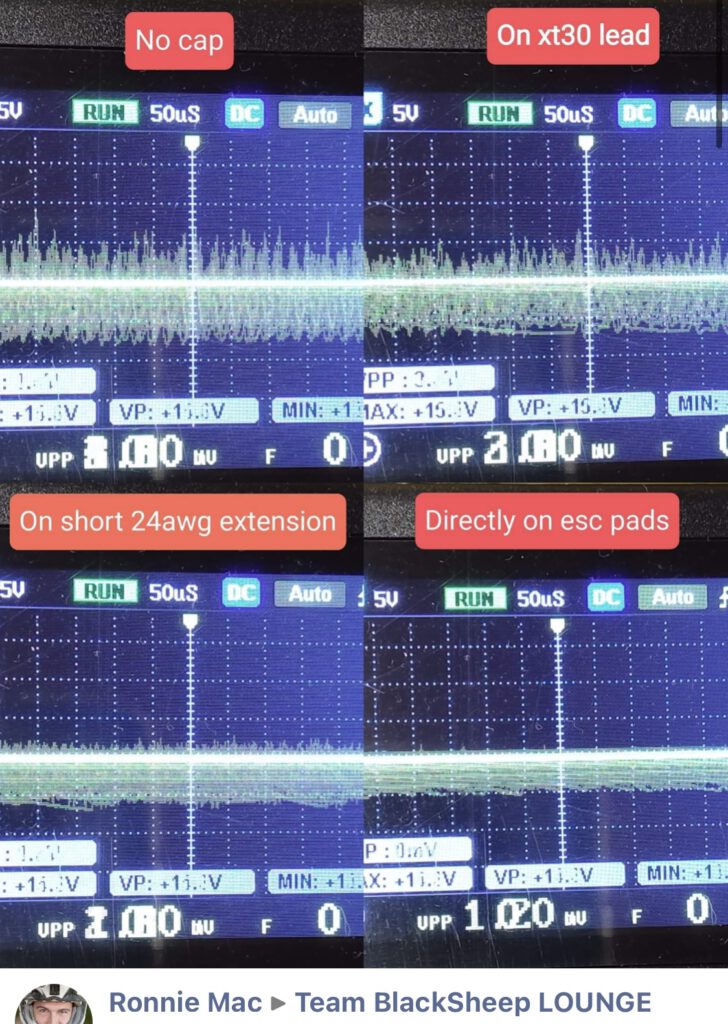
Bei schnellen Drehzahlwechseln induzieren Motoren beim Bremsen Strom der in den ESC fließt (Rekuperation). Dies erzeugt Spannungsspitzen und Magnetfelder die wiederum Spannungsspitzen im Flightcontroller induzieren. Das Gyroskop muss mit absoluter Gleichspannung betrieben werden. Jede Spannungsspitze die in den Gyro schlägt erzeugt eine Fehlmessung. Zum Abfangen der Spannungsspitzen müssen Kondensatoren installiert sein. Jeder FC hat SMD Kondensatoren verbaut und viele bessere FCs nutzen eigene Regulatoren nur zur Spannungsversorgung des Gyroskops. Zusätzlich muss ein Kondensator an den Batteriepads des ESC verbaut werden. Ideal ist ein LOW-ESR Kondensator, also einer mit niedrigem Eigenwiderstand um die Spannungsspitzen aufzunehmen.
Der Kondensator muss so nah wie möglich an die Quelle der Spannungsspitze, dem ESC sein. Der ideale Platz sind die Lipo-Anschluss-Pads am ESC oder dedizierte Kondensatorpads am ESC, wenn vorhanden. Nicht an den XT60/ XT30 Stecker (aber besser dort als nirgends). Je größer die Kapazität des Kondensators (Mikrofarad – µF) desto besser. Sweetspot ist 470-1000 µF. Die Spannung sollte ca. 30% über der maximalen Lipo-Spannung liegen. Bei 6S also 35V. Höhere Spannungswerte bringen keine Vorteile, da der Kondensator seine Kapazität dann nicht effizient nutzt. Kaufempfehlungen für LOW-ESR Kondensatoren sind Panasonic FR Serie oder die meist durch ESC-Hersteller mitgelieferte Rubycon Kondensatoren. Ein Kondensator ist Pflicht! Hab ich das schon erwähnt?
Sollte viel D-Term Noise im 0-200 Hz Band auftreten kann ein zusätzlicher 10V 470µF Kondensator auf der 5V Rail helfen. Man lötet diesen mit seinen nachträglich isolierten Beinchen oder ersatzweise mit Silikonkabeln auf ein freies 5V und GND Pad des Flightcontrollers. Bei einigen Flightcontrollern kann dies D-Term Noise reduzieren. Dies ist jedoch stark vom Design des FCs abhängig. Bei einigen FCs wird dies daher nichts bringen.
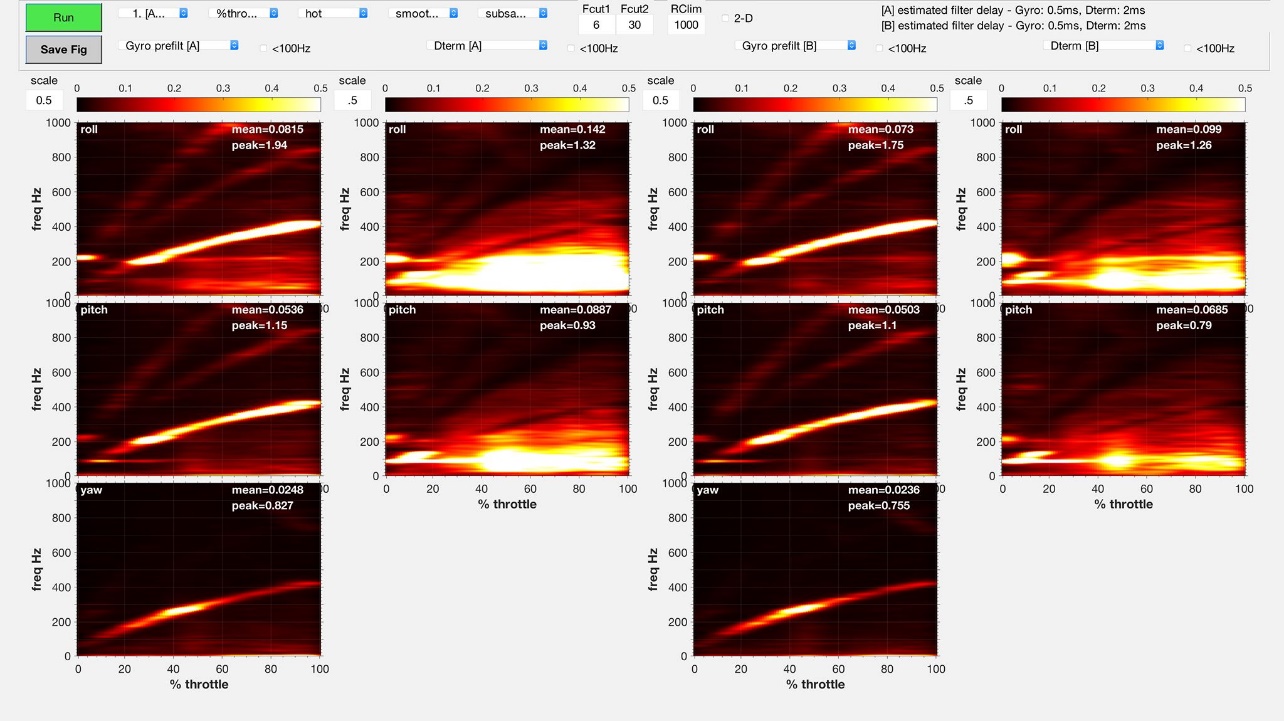
[© Brian White: links Gyro prefiltered und D-Term ohne zusätzlichen Kondensator, rechts Gyro prefiltered und D-Term mit zusätzlichem Kondensator.]

Als kleine Eselsbrücke…