Sind die Motoren zu Beginn oder am Ende schneller Flips und Rolls nicht in der Lage den nötigen Schub zu erzeugen, so nennt man dies „ausmaxen“ (vom englischen „to max out“). Der Motor ist gesättigt (engl. saturated) und kann die gewünschte Leistung nicht erbringen. Dadurch kann der Quadcopter die Lage nicht halten und sackt am ausgelasteten Motor ab, da hier der Schub fehlt. Dies erzeugt einen Wobble auf allen Achsen. (Cross-Axis-Wobble).
In der Blackbox erkennt man dies an Motorensignalen die am Anfang oder Ende eines Flips oder Rolls eine längere Zeit bei 100% stehen. Gleichzeitig weicht das Gyro-Signal vom Setpoint-Signal ab.
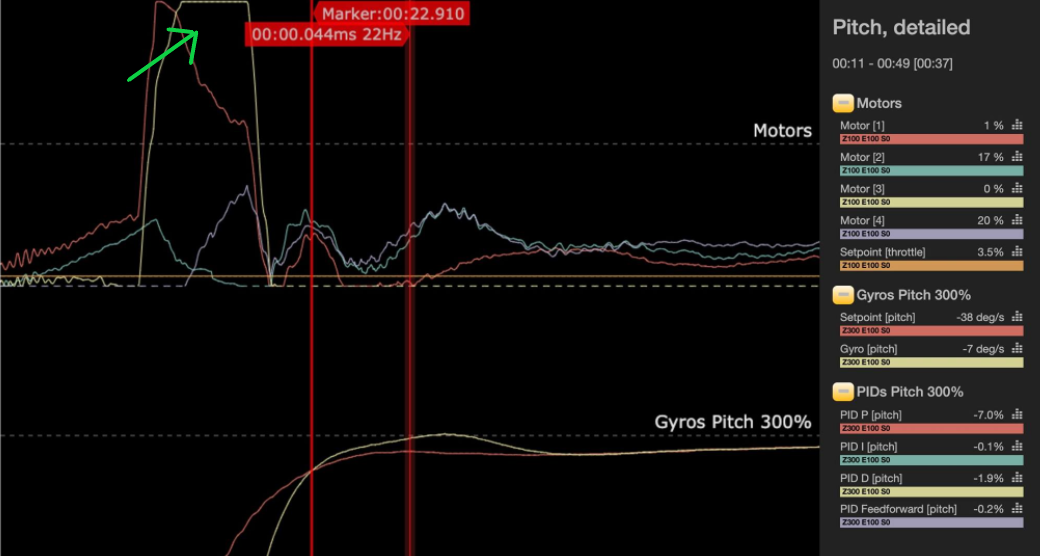
Am grünen Pfeil sieht man wie Motor 3 sein Maximum der Leistungsfähigkeit erreicht.
Die beste Lösung ist leistungsfähigere (größere) Motoren zu verbauen. Alternativ kann man die Drehrate (Rates) senken um damit nicht in die Verlegenheit zu kommen vom Motor Leistung zu fordern, die ihn überlastet. „Wegtunen“ kann man dieses Problem nicht.