Ein Tuning-Flug wird durchgeführt um Einstellungen zu testen und gegeben Falls Daten zur Blackbox-Analyse zu sammeln. Im Rahmen des Tunings werden immer wieder Testflüge notwendig und gezielt Daten zu sammeln und Entscheidungen beim tunen zu treffen. Ein paar generelle Sicherheitshinweise:
Setzt euren Quadcopter auf die Erde und nehmt etwas Abstand. Rechnet damit das der Quadcopter ausflippt oder unkontrolliert wegfliegt. Finger immer am Arm-Switch. Erstmal mit 0% Throttle armen. Klingen die Propeller ruhig und gleichmäßig? Ruht der Quadcopter auf der Erde? Es kann losgehen.
Vollständiger Tuning Flug #
Der vollständige Tuning Flug zielt darauf ab alle Einstellungen zu testen: Filter, PIDs, erweiterte PID-Funktionen, etc. Normalerweise fliegt man mit dem Blackbox-Modus „gyro_scaled“ (zur Filter-Analyse). Vorteil: man kann sich in einem Log einen kompletten Überblick verschaffen. Nachteil: Die Spektrum-Analyse wird verzerrt, da Propwash hier Frameresonanzen schwer identifizierbar machen kann.
Dreht erstmal eine kleine Runde, nur 15-30 Sekunden. Dazu kann die Blackbox deaktiviert bleiben. Abheben, einen kleinen Kreis fliegen und wieder landen. Die Motoren sollten maximal handwarm sein. Sind sie zu heiß um sie bequem 3 Sekunden anzufassen stimmt etwas nicht und Ihr lauft Gefahr beim Tuning-Flug einen Motor zu überhitzen „smoke a motor“ oder einen ESC zu zerstören „pop an ESC“.
Kann man die Motoren bequem anfassen folgt der Tuning Flug, zum Beispiel so hier:
Jeder kann den Tuning-Flug so fliegen wie er mag, aber man sollte einzelne, wiederholte Elemente fliegen in denen immer eine einzelne, isolierte Bewegung mehrmals ausgeführt wird. Keine gemischten Bewegungen, außer um den Quadcopter wieder auf Spur zu bringen. Ihr wollt anschließend in der Blackbox die einzelnen Bewegungsebenen (Roll/ Pitch/ Yaw) einzeln analysieren. Wichtig ist keine Äste/ Hindernisse o.ä. zu berühren und nicht abzustürzen. Es darf nicht zu viel Wind wehen. Ich würde folgendes Vorgehen vorschlagen:
- Abheben
- Langer konstanter Geradeausflug, Hände von den Steuerknüppeln nehmen,
- 2 lang gezogene Kurven in jede Richtung (auch Sweep, Orbit möglich) – hier gemischte Bewegung erlaubt
- Langsamer Punch out, 3x, von 0% auf 100% Throttle über 3 Sekunden und anschließend mind. 1 Sekunde dabei halten
- Hovern
- Snap roll moves (schnelle Bewegung auf der Roll-Achse nach rechts, Mitte, links, Mitte) in verschiedenen Geschwindigkeiten (Neigung maximal 80°), 5x
- Snap pitch moves (schnelle Bewegungen auf der Pitch-Achse vorn, Mitte, zurück, Mitte) in verschiedenen Geschwindigkeiten (Neigung maximal 80°), 5x
- Snap yaw moves (schnelle Bewegungen auf der Yaw-Achse rechts, Mitte, links, Mitte) in verschiedenen Geschwindigkeiten (Rotation maximal 180°), 5x
- Hovern
- Rolls, einzeln 360° in jede Richtung, dabei 2-3x Throttle 0% und 2-3x Throttle 20%
- Flips, einzeln 360° in jede Richtung, dabei 2-3x Throttle 0% und 2-3x Throttle 20%
- Yaw, 760° Drehung in jede Richtung, (nicht zu niedrig anfangen, Quadcopter könnte dabei etwas absinken)
- Hovern
- Propwash-Moves: Split S oder enge 180° Turns, richtig viele! Kitzelt Propwash richtig raus
- Hovern
- Etwas normales gemischtes Fliegen.
- Landen, dabei kurz vor touch-down disarmen
Tunt ihr für einen bestimmten Einsatzzweck, z.B.: LOS, Racetrack, Kameraplattform; dann macht es Sinn nach dem Filter und PID-Tuning zur Einstellung der erweiterten PID-Controller Funktionen und dem Feintuning genau diese Einsätze nachzufliegen und keine allgemeinen Tuning-Flüge. Ein Racecopter der ganz toll Rolls und Flips macht nützt euch ja nix, ihr wollt eng um Gatestangen herumzirkeln.
Das Log eines Tuning-Fluges wird mehrfach unter verschiedenen Gesichtspunkten angeschaut. Zum tunen ist dies unnötig lang und wird nicht verwendet. Häufigstes Anwendungsszenario ist Hilfestellung (online) oder generelle Analyse der Einstellungen.
Filter Analyse Flug #
- Langsamer Punch out, 3x, von 0% auf 100% Throttle über 3 Sekunden und anschließend mind. 1 Sekunde dabei halten.
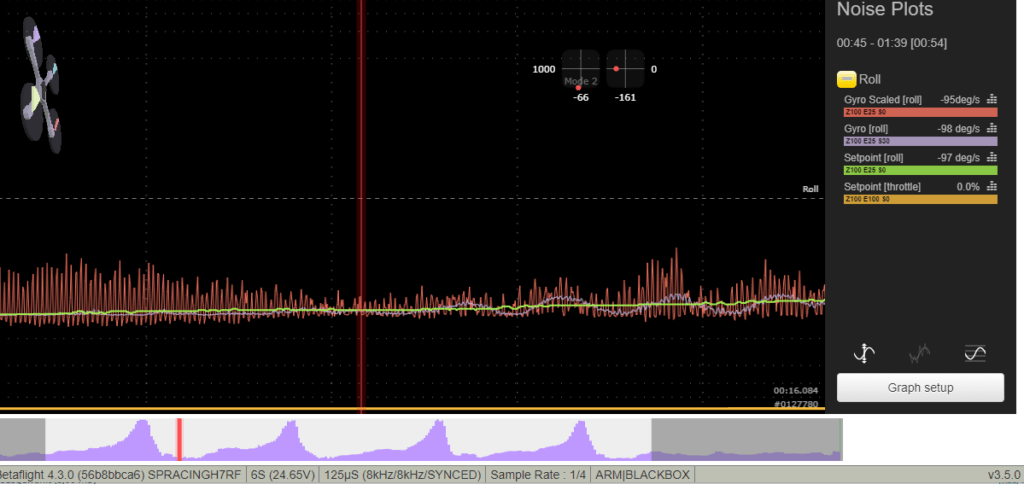
Sehr schnell gemacht. Gern kann man auch in einer Session mehrere Einstellungen hintereinander aufzeichnen und später in Ruhe auswerten. Im Blackbox-Explorer kann ein solcher Flug so aussehen:
Ausgewertet mit PIDtoolbox kann ein Filter Tuning Flug so aussehen.
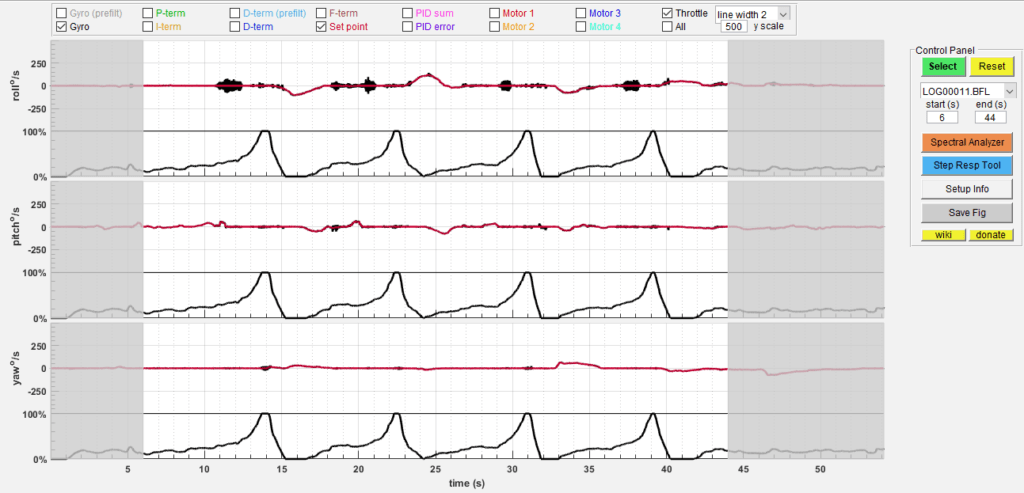
Anmerkung: Der Start und Endbereich wurde ausgeblendet. Analysiert werden nur die langsamen Punch-outs.
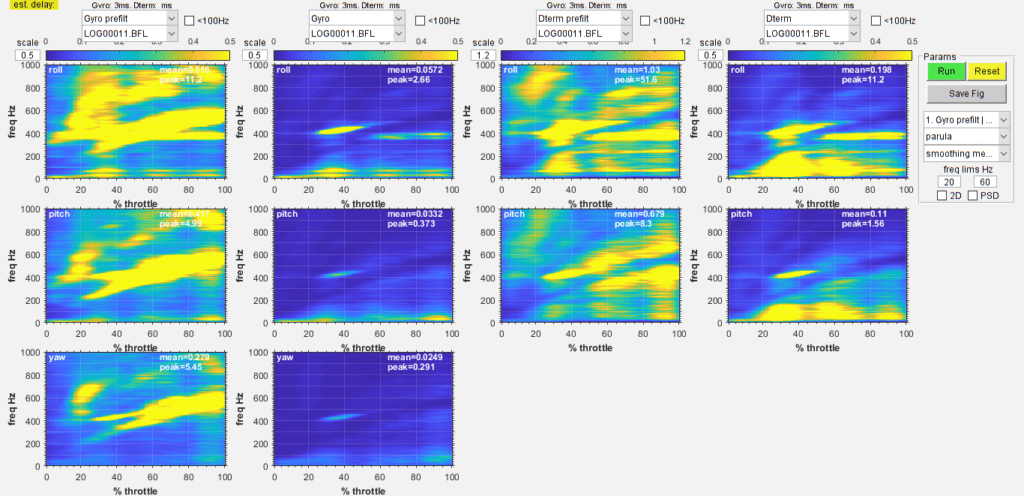
Zur Analyse wird PIDtoolbox eingesetzt. Hier sieht man sehr schön die Verarbeitung der Gyroskopsignale von links nach rechts. Die Empfangenen Signale (gyro_scaled) werden durch die Gyroskop-Filterung bearbeitet (gyro). Die Signale landen im D-Term (D-Term prefiltered) und werden durch die D-Term Filterung bearbeitet (D-Term) bevor sie in den Mixer gehen und an die Motoren gesendet werden. Zum genauen Herausarbeiten wird der scale-Faktor (oben links neben den Bildchen der ersten Zeile) so angepasst, dass die Frequenzbänder (schräge und horizontale Linien, sowie die „Blobs“) gut von einander abgrenzbar sind.
Basis-PID-Controller Tuning Flug #
klassische Methode: #
- Snap roll moves (schnelle Bewegung auf der Roll-Achse nach rechts, Mitte, links, Mitte) in verschiedenen Geschwindigkeiten (Neigung maximal 80°), 5x
- Snap pitch moves (schnelle Bewegungen auf der Pitch-Achse vorn, Mitte, zurück, Mitte) in verschiedenen Geschwindigkeiten (Neigung maximal 80°), 5x
- Snap yaw moves (schnelle Bewegungen auf der Yaw-Achse rechts, Mitte, links, Mitte) in verschiedenen Geschwindigkeiten (Rotation maximal 180°), 5x
Geeignet zur ausführlichen Analyse im Blackbox Explorer. Meist angewendet um den Basis PID Controller einzustellen. Dmin und FeedForward sollte deaktiviert sein.
Basement Methode: #
- sollte im Acro-Mode durchgeführt werden, Angle dämpft die Stickeingaben zu sehr
- hovern in 1m Höhe
- schnelles „wackeln“ an den Sticks (roll/ pitch/ yaw gleichzeitig) in alle Richtungen mit maximalem Ausschlag ohne im Keller gegen eine Wand zu donnern
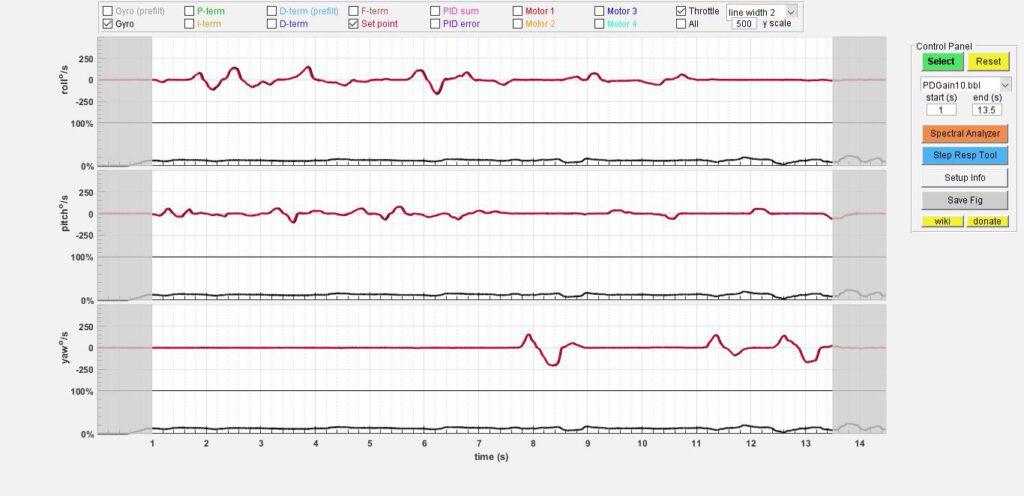
Geeignet zur schnellen Analyse des Basis PID Controllers mittels Step-Response-Tool. Nicht geeignet zur ausführlichen Analyse, da die Bewegungen gemischt sind und cross-axis-wobbles und bounceback außerhalb einer einzelnen Ebene nicht identifiziert wird. Vorteil ist, man kann in schneller Abfolge viele kurze Logs schreiben und später gesammelt bequem auswerten. Optimaler Weise sollte man zwischen jedem Log kurz den Lipo abziehen um eine neue Logdatei zu erstellen. Stellt man nur die Werte ein, ohne powercycle, werden alle Logs in eine Datei geschrieben.
Manchmal sehen die Kurven in der Step-Response Analyse etwas verwackelt aus. Daher ein paar Tipps für glatte Kurven und eine saubere Analyse:
- Logfilelänge mit 60-100 Bewegungen („n“ in PIDToolbox) – dies kostet etwas Übung
- ausreichende Winkel, keine Mikrobewegungen – Man kann auch ein weiteres Rateprofil mit linearen Rates anlegen (ohne Expo und Superrate) mit einer Maximalen Drehrate von 400°/s.
Propwash Tuning Flug #
- Propwash-Moves: Split S oder enge 180° Turns, richtig viele! Kitzelt Propwash richtig raus!
Geeignet um Frameresonanzen, Propwash und Umwelteinflüsse voneinander zu trennen. Meist wird zunächst ein vollständiger Tuning Flug absolviert, dann ein Filter Tuning Flug und anschließend ein reiner Propwash Flug. So kann man die Spektrum-Analyse der Blackbox Logs nebeneinander legen und schauen wo die Störung (Noise) genau her kommt.