Die Eingabe des Flugkommandos erfolgt an den Sticks der Fernbedienung. Diese wandeln das analoge Signal im Gimbal in ein digitales um. Dieses wird von System der Funkfernbedienung (OpenTX, EdgeTX, etc.) verarbeitet und an das Sendemodul (TX) gegeben (Protokoll hier zum Beispiel: CRSFShot). Dieses packt die Informationen in das Übertragungsprotokoll (Beispiel: CRSF, Tracer, Ghost, ExpressLRS, etc.) und sendet es an den Empfänger. Dieser decodiert das Signal und gibt es an den Flightcontroller weiter (zum Beispiel per: Serial CRSF, Spectrum, Fast-SBUS, etc.). Der Flightcontroller verarbeitet das Signal (RC-Smoothing, RC Filter) und errechnet daraus den Setpoint (also wo soll der Quadcopter hinfliegen). Damit hier ein qualitativ gutes Signal durchkommt müssen die Ingenieure viel Arbeit reinstecken. Neuere Systeme wie ExpressLRS, TBS Tracer, Crossfire mit Crossfire-Shot, DJI HDL, und Immersion RC Ghost bieten hohe Übertragungsraten (>150hz) mit sehr konstanten Datenpaketraten. Ein gutes Setpoint-Signal (Soll) ist Grundlage für einen guten Tune.
Der RC-Link ist in brenzligen Situationen die ausschlaggebende Komponente euren Quadcopter zu retten oder wenn abgestürzt wiederzufinden. Daher im Zweifel Umdrehen wenn die Telemetrie ausfällt.
Am RC-Link zu sparen ist das falsche Ende. Lieber etwas mehr Geld in ein hochwertiges System investiert als einen nur mäßig fliegenden Quadcopter einzurichten, den man im Zweifel nach einem Absturz nicht einmal wieder findet.
Was genau innerhalb der Transmittermodule (TX) und Receivermodule (RX) geschieht ist Geheimnis der Hersteller. Nur ExpressLRS ist open source und kann analysiert werden. Vergleichtests zeigen, dass alle modernen Systeme sehr nah beieinander liegen. Hier die Ergebnisse von UAV-Techs Analyse. Welches System nun die Nase ganz vorn hat kann sich mit jedem Firmware-Update ändern. Bevor man sich für ein System entscheidet sollte man folgende Punkte beachten:
900 MHz vs. 2,4 Ghz vs. 5,8 GHz #
Grundsätzlich gibt es drei Frequenzbänder die unterschiedliche Hardware erfordern. Die Hardware ist unterschiedlich, man kann also Antennen, Receiver und Transmitter nur für diese eine Frequenz nutzen.
900 MHz #
Ist der Überbegriff für 868 Mhz in Europa, 915 Mhz in den USA und Japan. Man muss die passende Frequenz in der Firmware des Transmitters und Receivers korrekt einstellen, da man sonst in Konflikt mit Mobilfunksendemasten kommen kann. Unterschiedliche Konfiguration in Receiver und Transmitter führt zu eingeschränkter Reichweite. Die meisten verfügbaren Antennen sind auf 900 MHz getunt und können weltweit verwendet werden. Besser sind natürlich direkt auf 868 Mhz getunte Antennen, welche aber nur in Europa mit der EU Einstellung geflogen werden sollten.
Anwendungsbereich ist Longrange (10km und mehr), Wings, autonom fliegende UAVs (INAV). Im FPV Quadcopterflug bis Midrange hat sich 2,4 GHz durchgesetzt. Der Mythos der besseren „Penetration“ also Durchdringungsfähigkeit von Wänden bei Bandos ist sehr alt. Dies galt vor den Zeiten moderner RC Links und verwendeter LoRa-Technologie. Mittlerweile kommt jeder halbwegs anständige RC-Link deutlich weiter als das Video.
Beispiel: TBS Crossfire, FRSky R9, ExpressLRS 900 MHz
2,4 GHz #
In diesem Frequenzband ist jedem das heimische WLAN bekannt. Auch ältere RC-Links nutzen dieses Spektrum und kommen mit ihren Modulen auf 1-2km Reichweite. Moderne RC Links setzten auf die von Semtech lizensierte LoRa-Technologie. Diese ermöglichen hohe Reichweiten bei wenig Energieverbrauch und hoher Resistenz gegen Störungen durch die verwendeten Chirp-Impulse. Alle modernen RC-Linksysteme setzen auf diese Technologie und damit auf den Semtech SX1280 (oder SX1281) Chip. Die Hardware ist also im Grunde gleich, was den Unterschied macht ist die Software und der verwendete Verstärker. Bedenkt aber: ein Sendemodul mit über 1W nützt wenig wenn man sich auf Telemetrie verlässt und der Receiver nur mit 25mW zurücksenden kann. Außerdem kommt man mit 100mW über 30km.
Anwendungsbereich: FPV Racing und Freestyle bis Midrange (<10km)
Bespiel: ImmersionRC Ghost, TBS Tracer, ExpressLRS, FrSky Archer
5,8 GHz #
Verwendet beim DJI FPV System als RC Link. Sonst wird dieses Frequenzband auch für analoge und digitale Videoübertragung genutzt.
Qualitätskriterien eines guten RC-Links #
Paketrate (bis 500 Hz) #
Die Paketrate gibt an wie oft ein neues Datenpaket vom Transmitter zum Receiver geschickt wird. 500 Hz ist die derzeit schnellste Verfügbare Übertragungsrate und bedeutet, dass alle 2 ms ein neues Paket gesendet wird. Je schneller die Übertragungsrate ist, desto öfter kommt ein neues Steuersignal an und man fühlt eine engere Verbundenheit zum Quadcopter. Man darf die Übertragungsrate allerdings nicht mit der Ende-zu-Ende-Latenz verwechseln, denn die Verarbeitung der Signale in der Fernsteuerung, Transmitter, Receiver und Flight-Controller kostet auch Zeit. Natürlich wird an jedem Punkt gearbeitet die Latenzzeiten kurz zu halten. Mit 500 Hz ist ein großer Schritt geschafft worden. Allerdings müssen nun auch die RC-Filter in Betaflight überarbeitet werden. Die volle Leistung wird also erst mit Betaflight 4.3 und voll integriertem CrossfireV3 verfügbar sein.
Niedrigere Paketraten sind nicht grundsätzlich schlecht. Alles ab 150Hz wird derzeit als gut angesehen. Wer Long-Range oder cinematic fliegt benötigt keine hohen Paketraten und kann auch mit 50Hz zufrieden sein. Je niedriger die Paketrate gewählt wird, desto höher ist die Reichweite.
Paketkonstanz #
Wie konstant die Pakete beim Receiver eintreffen ist ein wichtiges Qualitätsmerkmal. Im optimalen Falle sollten die Datenpakete regelmäßig wie ein Uhrwerk schlägt eintreffen. Nur dann kann Feed Forward Störungsfrei und mit möglichst wenig Jitter berechnet werden. Welches System eine gute Paketkonstanz bietet kann man nur testen und nirgends nachlesen. Zum Glück machen das Leute für uns:
Beachtet aber, dass diese Ergebnisse mit einem Firmwareupdate schon wieder ganz anders aussehen können, da Sendeeigenschaften von der Software und weniger der Hardware abhängig sind.
Sendeleistung #
Die Sendeleistung verrät mit wie viel elektrischer Leistung das Transmittermodul sendet. Wer Telemetrie verwendet muss bedenken, dass der Receiver zurücksendet, und das meist mit maximal 25mW. Vervierfache ich die Sendeleistung so erhalte ich die doppelte Reichweite. (Abstandsquadratgesetz) Allerdings gibt es moderne Technologien wie das oben genannte LoRa das eine Signalübertragung auch unterhalb der Rauschschwelle ermöglicht. Damit gelten diese alten Faustregeln nicht mehr. Mit modernen Protokollen kommt man auch mit wenig Leistung auf beachtliche Reichweiten, ohne spezielle und teure Antennen. Im Gegenteil:
Eine zu hohe Sendeleistung erzeugt Reflexionen des Signals und kann, gerade wenn mehrere Piloten fliegen zu Interferenzen führen. Hier hilft es die Sendeleistung runterzudrehen um besseren Empfang zu generieren. Bei modernen RC-Links sind 25mW für das gängige Racing und Freestyling ausreichend.
Tipp: Wenn ihr an einem neuen Spot fliegt, dann fliegt eine vorsichtige Proberunde auf der niedrigsten Sendeleistung und erhöht diese nur, wenn ihr Empfangsprobleme habt.
RSSI dBm und LQ #
Es gibt keine einzelne Verbindungsanzeige „wie gut“ der RC Link ist und ab wann ein Failsafe (Abriss der RC-Verbindung) droht. Wir können uns zwei Eigenschaften von Funkverbindungen anzeigen lassen: RSSI und LQ:
RSSI dBm #
Received Signal Strength Indicator – Dieser Werte beschreibt wie laut (absolut) der Empfang ist. -0,1 dBm ist die maximale Lautstärke und -130 dBm der kleinste Wert, den der Receiver noch entziffern kann. Die Skala ist logarithmisch, fällt also am Anfang stark und am Ende nur wenig ab. Problem: Das Signal muss lauter sein als die Störungen rundherum. Wie laut die Störungen sind ist aber von der Umgebung abhängig.
RSSI sensitivity limit gibt das leiseste Signal an, dass der Receiver noch verstehen kann. Dieser ist vom Receiver selbst und der verwendeten Paketrate abhängig. Grenzwerte stehen im Manual eures RC-Systems oder werden im LUA-Script angegeben. Beispiel für ExpressLRS 2,4 Ghz 500 Hz: -105dBm. Beispiel für ExpressLRS 915MHz 25 Hz: -123dBm.
LQ #
LQ(I) – Link Quality (Indicator) – Dieser Wert gibt an wie viele der zu erwartenden Datenpakete lesbar beim Receiver ankommen. Der Wert wird in % angegeben. 100% bedeutet jedes Datenpaket kam an. 50% bedeutet jedes im Durchschnitt zweite Datenpaket kam an. 0% bedeutet weniger als 1% der Datenpakete kommen im Durchschnitt an. Die Skala ist linear.
Interpretation #
Stellt euch vor ihr unterhaltet euch an einer viel befahrenen Bundesstraße. Ihr sprecht mit einer konstanten Lautstärke (-70dBm). Euer gegenüber versteht 9 von 10 Worten (LQ 90%). Es kommt ein LKW vorbei und euer Gegenüber versteht nun nur noch die Hälfte (-70dBm, LQ 50%). Nach dem LKW schaltet die Ampel auf rot und der Verkehr steht, euer Gegenüber versteht jedes Wort (-70dBm, LQ 100%). Ihr könnt nun leiser sprechen (-90dBm, LQ 100%). Ihr seht: wichtig sind beide Werte in Abhängigkeit zu einander.
Wenn ihr nur einen Wert anzeigen lassen könnt (DJI FPV System) nutzt LQ. Allerdings gibt es ein Problem: an Hindernissen kann LQ abreißen und ihr könnt plötzlich ohne Vorwarnung in eine Failsafe-Situation kommen. Habt ihr auch RSSI zur Verfügung würdet ihr sehen, dass RSSI schon vorher niedrig ist.
Wenn RSSI niedrig ist und LQ zu sinken beginnt: umdrehen. Wenn RSSI hoch ist und LQ sinkt: vorsichtig weiter fliegen.
Habt ihr nur LQ zur Verfügung, so ist ab einem Wert von 30 mit Failsafes zu rechnen.
Absolute Grenzwerte kann nicht definieren. Theoretisch ist ein Flug mit LQ 0% möglich. Bei 500Hz kommt bei 4 gültigen Datenpaketen pro Sekunde zwar weniger als 1% der Datenpakete gültig an, aber das entspricht immer noch 25 Hz Übertragungsrate. Ausreichend um einen Failsafe zu vermeiden.
RF Mode #
7:100 steht im Betaflight OSD, nur was bedeutet das? Bei LQ mischt Betaflight den RF Mode (RFMD) mit rein und zeigt diesen vor dem Doppelpunkt an. Hinter dem Doppelpunkt steht LQI. RF Mode wird von jedem RC-Link-System unterschiedlich belegt.
Von dynamischen Übertragungsraten wird dringend abgeraten (Crossfire dynamic). Beim Springen von einem RF Mode in den nächsten kommt es zu erheblichen Störungen im Feed Forward Signal und einmal im niedrigeren RF Mode springt das System nur sehr spät in den höheren RF mode zurück.
ExpressLRS 2,4 GHz
7=500Hz
6=250Hz
4=150Hz
2=50Hz
1=25Hz
0=4Hz (link recovery)
ExpressLRS 900 MHz:
5=200Hz
3=100Hz
2=50Hz
1=25Hz
0=4Hz (link recovery)
TBS Crossfire:
0=4Hz (Long Range)
1=50Hz
2=150Hz
Keiner Exkurs: früher hat Betaflight den RF Mode (als Zahl) mit dem LQ multipliziert. Die Anzeige ging im OSD aber nur bis 99%. Wenn du TBS Crossfire nun im Mode 2 geflogen bist hattest du fast die ganze Zeit 99% LQ, obwohl dahinter irgendwas von 200-99% versteckt war. Daher der Marketing-Gag „always 99%“.
Rechtliche Problematik #
Um ein RC-System in Deutschland zu nutzen muss das System über eine Zulassung verfügen und die rechtlichen Rahmenbedingungen erfüllen um legal genutzt zu werden. Hier sind die Antennen zum Beispiel fest mit dem Modul verbunden/ verklebt. Für einen Wechsel muss dieses Siegel aufgebrochen werden. Die Sendemodule besitzen eine Zulassung und CE Siegel. Der Betrieb ist ausschließlich mit der freigegebenen Firmware mit den legalen Einstellungen erlaubt. LBT (listen before Talk) ist Pflicht und wird meist mit der Regionseinstellung EU aktiviert. Erfüllt man eines dieser Kriterien nicht, und sei es nur eine Einstellung oder Sendeleistung über 25mW so darf der Quadcopter formal nicht betrieben werden und man ist für Störungen im Funkverkehr haftbar.
Eine Zulassung haben meist Systeme die ihr bei deutschen Händlern beziehen könnt. TBS, ImmersionRC, FRSky, etc sind zugelassen. ExpressLRS hat keine Zulassung und es wird nach Aussage des Entwicklerteams derzeit auch keine Zulassung angestrebt.
Disclaimer: Dieser Artikel stellt keine Rechtsberatung dar. Die Angaben erfolgen nach bestem Wissen, eine Vollständigkeit wird nicht garantiert. Angaben ohne Gewähr.
RC-Linkqualität beurteilen und optimieren #
Hat man sich für einen Frequenzbereich und ein System entschieden kann man den RC-Link nach folgenden Kriterien beurteilen. Ändern am TX und RX kann man lediglich die Einstellungen sowie die Antennenauswahl und Positionierung. Die Änderungen zu Vergleichen sollte man einen Test-parkour mit Hindernis abfliegen, zum Beispiel um ein größeres Gebäude herum, bei dem das Video gerade so erhalten bleibt. Diesen Flug loggt man im Debug Mode „RC_SMOOTHING_RATE“. Er gibt uns folgende Infos:
- [0] = log each RX frame interval (shows the delay from the previous frame in microsecond)
- [1] = log the training step count
- [2] = the current calculated average (shows the current „locked“ rate used to set the filters)
- [3] = indicates whether guard time is active
- [0] = Abstand der empfangenen Datenpakete in ms
- [1] = unwichtig
- [2] = gemittelte Datenpaketrate zur RC Smoothing Filterberechnung
- [3] = unwichtig
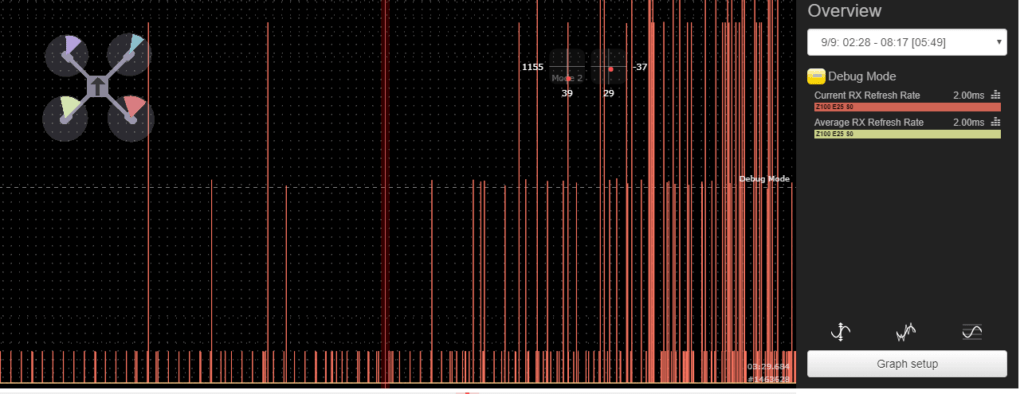
Im oberen Bild sieht man im linken Bereich einen Störungsarmen Flug. Die kleinen, dünnen, regelmäßigen roten Zacken links sind die Sendepausen für die Telemetriedatenpakete. Als System wurde ExpressLRS 2,4GHz auf 500Hz mit einer Telemetrie-Ratio von 1:64 verwendet. Hier wird jedes 64. Paket ausgelassen um Telemetriedaten zu empfangen. Diese Datenpaketausfälle sind also gewollt. Fliege ich hinter das Gebäude geht die Zahl der verlorenen Pakete deutlich nach oben (rechter Bereich). Man sieht längere Striche (mehrere Pakete hintereinander ausgefallen) und man sieht häufiger Striche (öfter Pakete ausgefallen).
Nun kann man Antennen tauschen, Antennen anders Positionieren, Sendeleistung erhöhen, etc und schauen, ob man einen wirklichen Unterschied sehen kann, wenn man den gleichen Flug mit dem geänderten Setup wiederholt.