Ihr habt euren ersten Quadcopter als Bind-and-Fly oder Ready-to-Fly gekauft. Ab auf das Feld und los geht’s? So einfach ist es leider nicht. Im folgenden wird davon ausgegangen, dass ein Copter zur Verfügung steht, der fertig aufgebaut ist und nur noch an eine vorhandene Funkfernsteuerung gebunden werden muss. Ihr habt euch zum Thema Akkus etwas eingelesen und im Simulator geübt. Zur Sicherheit muss ein Check aller Einstellungen in Betaflight durchgeführt werden.
Der nachfolgende Artikel ist eine Schritt für Schritt Beschreibung um Deinen Copter flugfertig zu bekommen, bzw. zu prüfen ob alle notwendigen Konfigurationen auch so eingestellt sind, das der Erstflug auch funktioniert.
Arten von kaufbaren Quadcoptern #
RTF: Ready to Fly. Hier ist alles aus einem Guss – Copter fertig gebaut, inkl. Fernsteuerung und Videobrille. Ob alles von hoher Qualität ist, muss man abwägen. Fakt ist, kaufen, Lipo dran, fliegen.
BNF: Bind and Fly, der Copter ist komplett aufgebaut inkl. einem Receiver und muss nur noch gebunden werden. Der Copter wird in der Regel ohne Fernsteuerung und Videobrille geliefert. Daher ist es wichtig sich den passenden Receiver zur vorhandenen Fernsteuerung auszusuchen. Dieser Artikel ist für Dich sicherlich lesenswert, denn Du erfährst viel über die Minimal-Konfiguration eines Copters.
PNP: Plug’n’Play. Der Copter ist im Prinzip zusammengebaut, es fehlen aber Receiver und Videosender also auch Akku. Der Receiver muss noch am Flight-Controller angelötet werden und in Betaflight konfiguriert werden. Zusätzlich muss der Receiver an den jeweiligen Sender gebunden werden. Du hast einen PNP-Copter, dieser Artikel gibt Dir einige Tipps, wie du ihn konfigurieren kannst bzw. die Grundeinstellung überprüfen kannst.
ARF: Almost Ready To Fly. Nicht komplett zusammengebaut und einiges muss noch gemacht werden. Gerade für ARF Copter ist diesen Manual wichtig.
Bausatz / eigener Aufbau : Sicherlich die aufwendigste Art einen Copter zu bauen aber man lernt enorm bei dieser Vorgehensweise. Es dauert deutlich länger, ist nervenaufreibender aber die Krönung des Copter-Baus. Es geschafft zu haben, ist der Lohn für die Zeitaufwand. Zusätzlich zum Copter benötigt man eine Reihe an Werkzeugen und anderen Utensilien. Dieser Artikel gibt dir für die erfolgreiche Konfiguration/ Installations Deines Copters viele gute Tipps.
Tipp: Wenn noch nie ein Copter zusammengebaut wurde, einen erfahrenen FPV Piloten um Rat bitten in der Auswahl der einzelnen Komponenten. Das spart Geld, Nerven und sehr viel Zeit.
Im Beispiel soll BNF/PNP Copter und ein OpenTX Sender (z.B. eine Taranis X9D) mit einem FrSky XM+ Sender gebunden werden. Das Ganze ist in einem fertigen BNF/PNP Copter verbaut. Nachfolgenden werden grundlegende Schritte beschrieben, die auf jeden Fall geprüft werden sollten.
Aktuell gehen Hersteller von BnF Coptern dazu über auf ExpressLRS Receiver umzurüsten (Ankündigung Diatone). BnF Copter von Happymodel setzen schon ExpressLRS. Auch Flight-Controller mit eingebauten ExpressLRS Receiver stehen schon zur Verfügung. Näheres zu ExpressLRS hier. Ein guter RC Link ist Ausgangslage für einen gut fliegenden Quadcopter. Habt ihr die Wahl, dann entscheidet euch für einen guten RC Link wie ExpressLRS, Crossfire, Tracer oder Ghost und nutzt nicht FrSky, Flysky oder Nirvana.
Binden des Empfängers #
Dieser Schritt ist häufig der frustrierendste Schritt, da er häufig nicht auf Anhieb funktioniert. FrSky-Receiver werden mit unterschiedlichen Firmwares ausgeliefert. Entweder mit einer NON-EU Version (FCC) oder einer EU-Version(LBT). Wichtig für die weiteren Arbeiten ist: FW des Senders und des Empfängers müssen gleich sein. Versuche den Receiver und Sender zu binden wie es in der Beschreibung steht. Youtube ist hilfreich.
Betaflight-Konfiguration #
Der Betaflight-Konfigurator ist das zentrale Tool um sämtliche Einstellung innerhalb des Flight-Controllers (FC) durchzuführen. Die Software steht für alle wichtigen Betriebssystem zur Verfügung (MacOS, Linux und Windows). Die Installation ist Bedingung für alle weiteren Schritte und der Copter muss fehlerfrei über USB zum PC Verbindung aufnehmen können. Unter Windows kann es sein, das ein USB-Treiber installiert werden muss. Näheres zur Installation und Lösung von eventuellen Verbindungsproblemen findet ihr in den jeweiligen Artikel. Nachfolgende Schritte gehen davon aus, der BF-Configurator geöffnet ist und mit dem FC verbunden ist
Backup der Betaflight-Konfiguration #
Bevor man etwas ändert immer ein Backup der aktuellen Einstellungen durchführen! Links im Navigator auf CLI (Command Line Interface) gehen. Hier eingeben:
diff allNun den Button SAVE to file klicken und die Daten speichern. Der Befehl „diff all“ zeigt alle Anpassung abweichend con der BF-Grundkonfiguration.
Tipp: Der Betaflight Configurator merkt sich die eingegebenen Befehle. Mit den Pfeiltasten up/down kann man sich die letzten Befehle nochmals anzeigen lassen und diese nutzen.
Konfiguration des Receivers in Betaflight #
Voraussetzung hierfür ist, dass der Receiver auch korrekt an den FC verlötet wurde. Es gibt drei oder vier Kabel, Rot, Schwarz, Gelb/ Weiß/ ?. Rot=5V (+Pol), Schwarz=GND (-Pol), das andere Kabel ist das Signalkabel (in der Regel SBUS, FlySky Empfänger haben häufig IBUS) und muss an dem SBUS, bzw. einem UART-RX Pad des Flight-Controllers verlötet werden. Bei Crossfire, Tracer, Ghost, ExpressLRS, etc, gibt es zwei Kabel (RX & TX). RX vom Receiver muss auf TX vom Flight-Controller verlötet werden. TX vom Receiver muss auf RX vom Flight-Controller. Diese Verbindung nennt man eine UART-Verbindung und man kann sich dies wie eine USB-Verbindung ohne Spannungsversorgung vorstellen.
Im nachfolgenden Screenshot ist der Receiver mit UART1 auf dem FC verbunden. Nun im BF-Konfigurator den Tab PORTS gehen. Hier werden die Schnittstellen und deren Anschlüsse konfiguriert. Bei UARTx in der Spalte Serial RX den Schiebeschalter aktivieren. Alles andere in der Zeile ignorieren. Es darf immer nur eine Option pro UART aktiviert werden, das heißt MSP oder Serial Rx oder Telemetry oder… anschließend den Save & Reboot Button klicken.
Achtung: Nicht den Schiebeschalter USB/VCP in der Spalte Config/MSP deaktivieren; nicht den Schieberegler für UART des Receivers in der Spalte Config/MSP aktivieren.
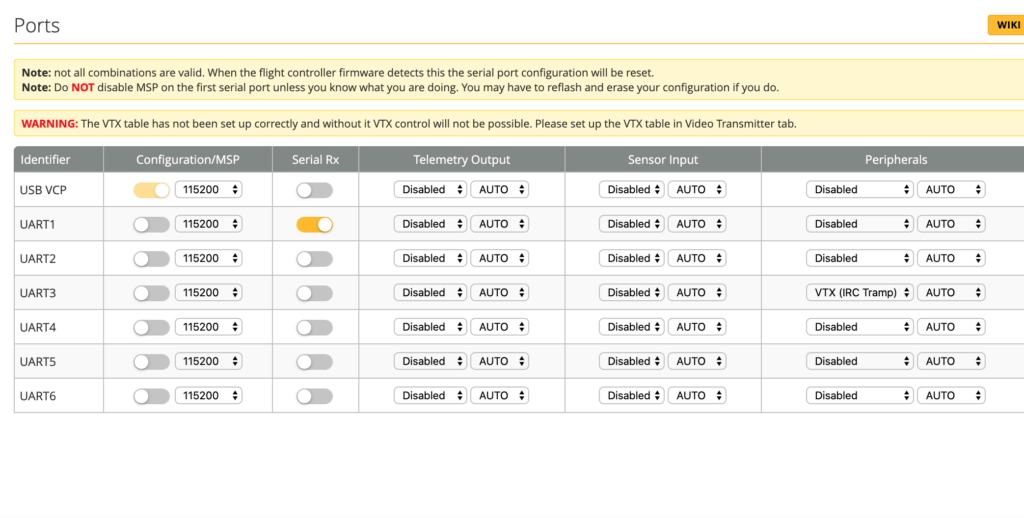
Im Screenshot sieht man, das UART3 als IRC Tramp Kanal genutzt wird. Speichern und nochmals PORTS aufrufen und kontrollieren ob auch auf UART1 Serial RX aktiv ist. Zusätzlich muss im Bereich CONFIGURATION noch das Protokoll des Receivers kontrolliert bzw. angepasst werden.
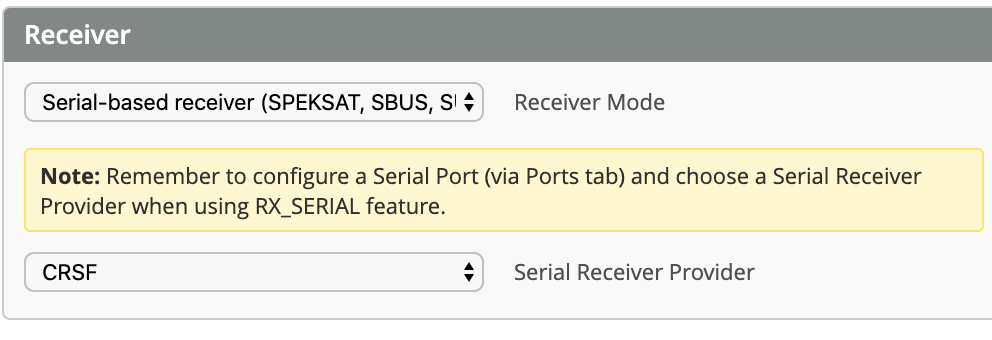
Receiver-Mode
- Serial based Receiver
Serial-Receiver Provider
- Für SBUS – Receiver bitte SBUS auswählen
- Für IBUS – Receiver bitte IBUS auswählen
- Für TBS, ExpressLRS – Receiver bitte CRSF
- Für DJI Air/Vista Unit – DJI_HDL auswählen
Nun in den Menüpunkt Receiver im BF-Konfigurator wechseln. Dort sieht man farbige Balken für alle Kanäle (ROLL, PITCH, YAW, THROTTLE und AUX1-AUXx). Bei manchen Quadcopter muss ein Akku angeschlossen sein, damit der Receiver Strom erhält. Sobald man am Sender nun ein Stick bewegt, **muss** man diese Ausschläge hier im BF-Konfigurator sehen. Prüfe alle Kanäle die im Sender definiert wurden. In der Regel sind das 8 Kanäle. Ist dem nicht so, ist bei den vorherigen Schritten etwas nicht richtig gelaufen.
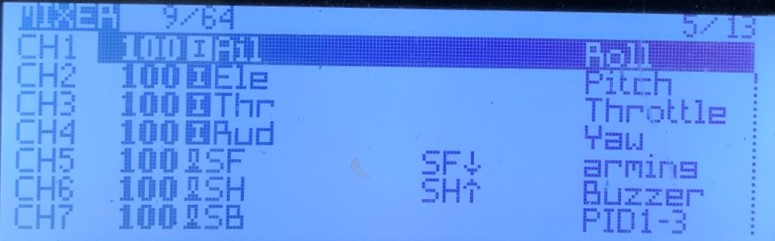
Tipp: bei CRSF Receivern darauf achten, dass CH1 an einen UARTx-RX Port und CH2 an den gleichen UARTx aber TX Port gelötet wurde. Im Sender sollten die Kanäle wie folgt definiert sein (ist nicht Pflicht macht aber das Leben einfacher).
- CH1 = ROLL = A
- CH2 = PITCH = E
- CH3 = Throttle = T
- CH4 = YAW = R
- CH5, CH6, CH7, CH8 auf Switches legen. CH5=AUX1, CH6=AUX2, usw.
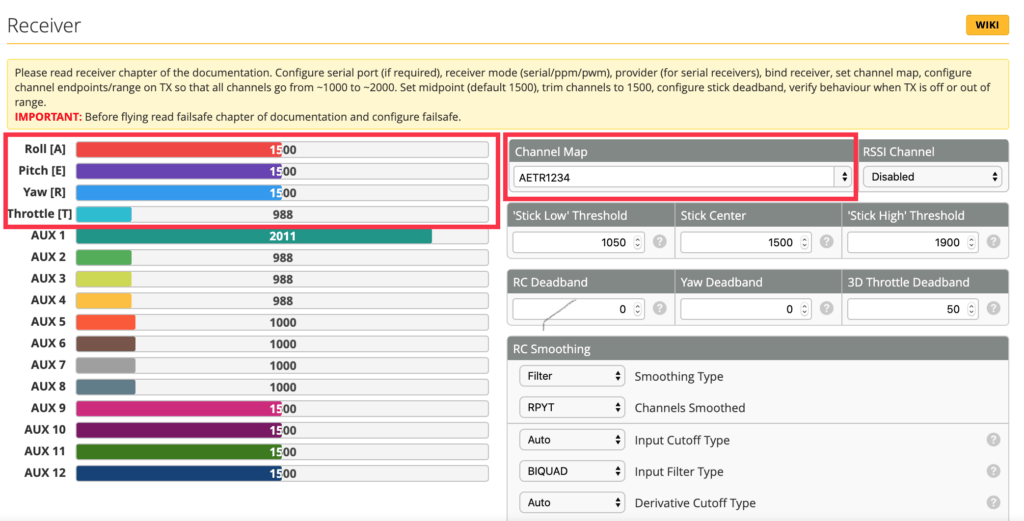
Im Feld Channel-Map AETR1234 einstellen. Immer daran denken alle Einstellungen mit dem SAVE Button zu sicher.
Tipp: wenn man mehrere Copter besitzt sollte man im Sender immer die gleichen Reihenfolge der Kanäle nutzen. Das macht es deutlich einfacher wenn es mal Probleme gibt, da man sich dann häufig nur auf den Betaflight-Konfigurator konzentrieren muss.
Kalibrieren der Endpunkte und Sticks #
Die Signalbreite eines Sendersignals liegt im Bereich von 1000us – 2000us und so werden auch die Daten in Betaflight verarbeitet. Wie dies geht findet ihr hier.
Schalterfunktionen definieren in Betaflight #
Im vorherigen Abschnitt wurden im Sender schon die Kanäle CH5,6,7,8 auf Schalter/Taster gelegt. Alle Schalter werden in Betaflight als AUX1 (CH5), AUX2 (CH6), AUX3 (CH7), AUX4 (CH8) erfasst. Im Receiver Tab die Funktionen der AUX-Kanäle explizit prüfen ob sie auch angesprochen werden. Bei der Betätigung der jeweiligen Schalter muss es in Betaflight ein Änderung des jeweiligen AUX Kanal geben.

Nun in den Tab MODES wechseln. Hier können diverse Funktionen mit AUX-Kanälen verbunden werden.
ARMING Schalter definieren #
Grundsätzlich gilt: der kleine gelbe Strich in der Skala symbolisiert den Schalterstellung und verändert sich sobald man den Schalter bewegt. Mit dem Slider kann man den aktiven Bereich definieren. Zieht diesen Bereich auf die gewünschte Schalter-Position und schränkt den Bereich ein. Man kann den linken und rechten Endpunkt entsprechend verschieben. Ist der gelbe Strich unterhalt des aktiven Bereiches ist der Mode aktiviert. Ist der Strich außerhalb ist der Mode deaktiviert.

Um überhaupt einen AUX-Kanal zu nutzen die Auswahlbox auf AUTO stellen und dann den gewünschten Schalter betätigen oder direkt den entsprechenden AUX-Kanal auswählen. Der Arming Schalter wird nach allgemeiner Konvention immer auf AUX 1 platziert. Nicht jeder Transmitter sendet alle AUX-Kanäle gleich häufig. AUX1 wird aber immer mit jedem Datenpaket mitgesendet.
BEEPER Schalter definieren #
Aus Sicherheitsgründen sollte immer ein Schalter für einen Motor-Buzzer definiert werden. Sobald der entsprechende Schalter aktiviert wird fangen die Motoren an zu piepen. Dies hilft den Quadcopter im hohen Gras wiederzufinden.

Es gibt noch eine Reihe von anderen Möglichkeiten Funktionen auf Schalter zu legen. Für viele sicherlich wichtig sind die unterschiedlichen Flug-Modes
Flug-Modi #
Drei Flug-Modi stehen zu Verfügung – ACRO / HORIZON / ANGLE. Daher bietet es sich an, diese drei Funktionen über einen Drei-Positionen-Schalter abzubilden.

Der Trick hier ist – Schalterposition 1(Oben) – keine Slider-Aktivität entspricht dann dem ACRO-Mode. Schalter-Position 2 (Mitte) – im Beispiel ANGLE-Mode. Schalter-Position 3 (Unten) im Beispiel HORIZON.
Tipp: Einen Panikschalter einrichten.
Accelerometer Kalibration & Fluglagenkontrolle #
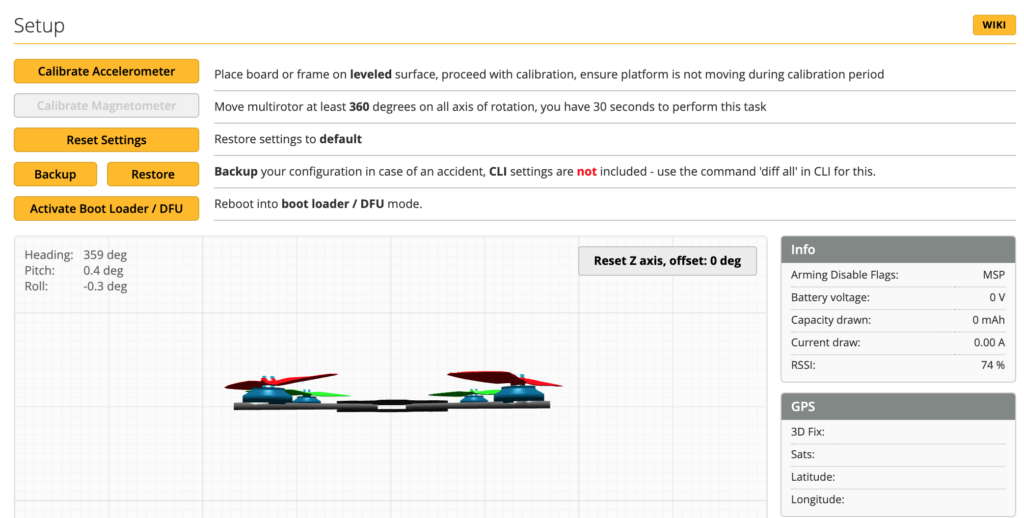
Sollte bei einem BNF/RTF Copter korrekt sein. Im BF-Konfigurator auf den obersten Menüpunkt gehen SETUP. Dort sieht man nun im unteren Teil einen Copter und oben einige Buttons.
- Copter absolut waagerecht in Bezug auf die Rotorenebene auf die Werkbank legen – nicht bewegen und den Button CALIBRATE ACCELEROMETER klicken. Der Copter im Bild sollte nun ebenfalls exakt waagerecht liegen.
- Nun den Copter in die Hand nehmen und bewegen. Der Copter am Bildschirm muss exakt die gleiche Bewegung machen. Der grüne Pfeile symbolisiert vorn.
Stimmt hier was nicht ist die Lage des FC und die Konfiguration fehlerhaft und muss angepasst werden.
Motordrehrichtung prüfen #
Elementar wichtiger Schritt, dreht ein Motor in die falsche Richtung wird der Copter nach dem Armen sofort „ausflippen“ sobald man etwas Gas gibt.
Grundsätzlich gibt es zwei Typen von Motor-Drehrichtungen. Warum Props Out verwendet werden sollte könnt ihr hier nachlesen.
- den Aussendreher – Props out (die richtige Drehrichtung)
- den Innendreher – Props in (häufiger Default, aber falsch)
Im BF-Konfigurator auf den Motors-Tab gehen. Der Akku muss am Copter dran sein. Bestätigt, dass ihr die Propeller wirklich abgenommen habt.

WARNUNG: Keine Props am Copter solange er auf der Werkbank liegt und man bastelt – Verletzungsgefahr.
Es geht nur darum zu prüfen ob die Motoren laufen und ob die Drehrichtung stimmt. Sollte die Drehrichtung eines oder mehrerer Motoren nicht stimmen, kann die Drehrichtung über die ESC Software eingestellt werden.
Wenn der Copter über USB verbunden ist, ein Lipo angeschlossen ist kann über den Sender kein ARMING durchgeführt werden. Möchte man dies Testen, muss der o. g. Motor-Switch auf ON gestellt werden. Jetzt kann man armen und auch diese Funktion testen. Hiervon wird aber dringend abgeraten, da in dieser Situation der PID Controller aktiv wird und der Quadcopter versucht durch Anpassung der Drehzahl eine Lage im Raum zu korrigieren. Da dies ohne Propeller nicht funktioniert werden die Signale an die Motoren schnell angepasst und man läuft sehr schnell Gefahr die Motoren und ESCs zu überhitzen und durchbrennen zu lassen.
Motor Protokoll auswählen #
Die Auswahl des Protokolls ist wichtig für die Abstimmung des Copters. Betaflight unterstützt eine Reihe von unterschiedlichen Protokollen. Wir nutzen DShot. Bidirectional Dshot sollte heutzutage Standard sein. Weitere Infos zur Einstellung findet ihr hier.
Die Drehzahl der Motoren kann mit dem Motor Idle Throttle Value justiert werden. Einige Motoren benötigen hier einen etwas höheren Wert. Alle Motoren müssen im ARM Modus gleichzeitig ohne zu stottern anlaufen. Falls nicht, den Wert in 0,1er Schritten erhöhen und prüfen.
OSD Ansichten optimieren #
In der Brille kann man sich diverse Flugparameter anzeigen lassen. Nachfolgende Parameter sollten standardmäßig aktiviert werden. Um aber überhaupt OSD zu sehen muss im Configuration Tab der Schalter OSD und Telemetrie aktiviert werden.
- Battery average cell voltage : zeigt die Zellspannung des Akkus an
- Battery voltage: zeigt die komplette Spannung des Akkus an
- LQ, oder zumindest RSSI
- DISARM
- WARNINGS
Infos zu LQ und RSSI findet ihr hier.
VTX Tabelle kontrollieren #
Bei einem BNF/RTF Copter sollten alle Einstellung zum verbauten VTX schon vorkonfiguriert sein. Die Konfiguration eines neuen VTX kann wie folgt durchgeführt werden. Ab BF 4.1 wird eine VTX-Tabelle verwendet, die speziell den verwendeten VTX definiert. Also Anzahl der Channels, Anzahl der Power Bereiche, etc. Standardmäßig wird bei einem FW-Update von BF keine VTX-Tabelle mitgeliefert. Diese muss manuell angelegt werden. Download einer VTX-Tabelle kann von hier durchgeführt werden oder ist auf der Website des Herstellers zu finden. Tabelle via LOAD Button auf den FC laden und SAVE Button klicken nicht vergessen. In der Regel wird entweder IRC Tramp (EU) oder SmartAudio 2.0 (EU) genutzt. SmartAudio/IRC Tramp funktioniert aber nur dann, wenn vom VTX ein viertes Kabel vom entsprechenden Lötpad des VTX an den FC verlötet wird. Dieses Kabel geht in der Regel an ein UART-TX Pin. Dieser UART-TX Pin muss im Ports-Tab entsprechend korrekt konfiguriert werden. Dort in der Spalte Peripherie (ganz rechts) in der Auswahlbox SmartAudio oder IRC Tramp auswählen.

Weitere Einstellungen #
Zunächst solltet ihr mit den Default-Einstellungen des Herstellers oder den Default-Werten von Betaflight recht gut fliegen können. Übt und genießt erstmal euren Quadcopter, sicherlich werdet ihr ihn bald reparieren müssen. Wer ins Thema Tuning einsteigen möchte kann gern hier einsteigen.
Erzeuge ein Backup eurer aktuellen Einstellungen über die CLI
diff all
und speichert die Datei auf dem PC.
Preflight-Routine #
Diese Routine solltet ihr vor jedem Flug abarbeiten, dauert nur wenige Sekunden.
- Funkfernbedienung und Videobrille anschalten
- Akku an Quadcopter anschließen
- Empfänger verbunden/ Bild da?
- Armen. Motoren drehen ruhig und gleichmäßig, klingen sauber?
- Vorsichtig kurze Bewegung in jede Richtung (roll, pitch, yaw)
- Alles ok? Auf gehts 🙂
Anmerkungen #
Ein Quadcopter ist alles andere als ein Spielzeug. Beachtet die Rechtslage, fliegt nur in erlaubten Gebieten und nehmt einen Spotter mit. Führt euren Haftpflichtversicherungsnachweis und Kenntnisnachweis mit euch. Siehe auch: Legaler Quadcopterflug in Deutschland.
Autor – LunaX