Mit dieser Software wird der ESC geflasht oder eingestellt. Bei aktuellen Quadcoptern passiert dies per serial passthrough. Das heißt der Flightcontroller agiert als serial interface und übersetzt die Verbindung von USB zum ESC. Dazu darf keine andere serielle Verbindung bestehen, also nicht Betaflight Configurator und BLHeli32_Suite gleichzeitig nutzen. Damit der ESC überhaupt hochfährt wird in der Regel Lipo-Spannung benötigt.
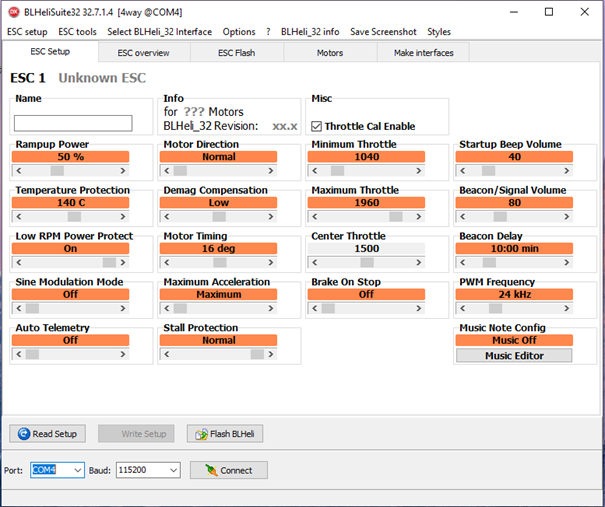
Also COM-Port wird der COM-Port benutzt, den ihr auch in Betaflight benutzt um auf den FC zuzugreifen. „Connect“ und anschließend „Read-Setup“ liest die Einstellungen aus.
Es ist möglich mehrere ESCs gleichzeitig zu programmieren. Dazu auswählen welcher programmiert werden soll. In dem oben genannten Beispiel sind alle 4 ESCs ausgewählt. Will man nur ESC 2 programmieren, dann wählt man ESC 1, 3 und 4 ab, sodass […] anstatt [1] angezeigt wird. Am Ende immer noch einmal alle Einstellungen mit „read“ überprüfen, damit sich kein Fehler einschleicht.
| Hardware Variante | mögliche Firmware |
| BLHeli_32 Hardware | BLHeli_32 AM32 |
| BLHeli_S | BLHeli_S BLHeli_M (Jazz Maverick) JESC Bluejay |
| KISS | KISS ESC Firmware |
| APD F3 Serie | APD ESC Firmware APD ESC Beta Firmware für RPM Filterung |
Weiterführende Informationen und Empfehlungen für Einstellungen findet ihr für BLHeli_32 Hardware hier, für BLHeli_S Hardware hier und für APD Hardware auf der Herstellerhomepage. Für den Anfang würde ich hier immer alle Werte Default lassen. Bei einem Bind and Fly (BNF) lohnt es sich zu schauen ob der Hersteller individuelle Einstellungen eingepflegt hat. Falls ja unbedingt ein Backup machen.