Interessant für Whoop-Piloten im Angle- oder NFE-Racemode.
Die meisten FPV Piloten fliegen im Mode 2. Der linke Steuerknüppel betätigt Throttle (Gas, hoch/ runter) und Yaw (Drehung, rechts/ links). Der rechte Steuerknüppel betätigt Pitch (Neigung, hoch/runter) und Roll (Neigung, rechts/ links). Da die Fernsteuerungen aus dem Modellflugzeugbau stammen werden oft die Flugzeug-Bewegungen genannt. Siehe auch hier.

Um eine Kurve zu fliegen ist im Acro-Mode eine koordinierte Bewegung aus allen vier Achsen notwendig. Beim 5-Zoll Quadcopter spielt hier Yaw eine untergeordnete Rolle. Bei Whoop-Racing im Angle- oder NFE-Racemode wird aber sehr viel Yaw benötigt. Dies führt dazu, dass es schwieriger wird Throttle präzise zu steuern, da die großen Ausschläge die bei Yaw notwendig sind zum abdriften an der Throttle-Eingabe führen. Whoops reagieren etwas träge, daher ist ein präzises Throttle-Management wichtig.
Emuflight bietet auf Firmwareebene mit DAS – dual axis steering – eine Möglichkeit über die Eingabe der Roll-Achse etwas Yaw auszuführen („mix roll into yaw“). Betaflight kann dies nicht, aber über die Fernbedienung kann bei OpenTX und EdgeTX der gleiche Effekt erreicht werden. Ziel ist es den Yaw-Stick weniger nutzen zu müssen und die Lenkbewegung mehr über Roll auszuführen. Der linke Stick muss nun weniger nach rechts und links bewegt werden, das Throttle-Management wird präziser. Natürlich muss man sich etwas dran gewöhnen.
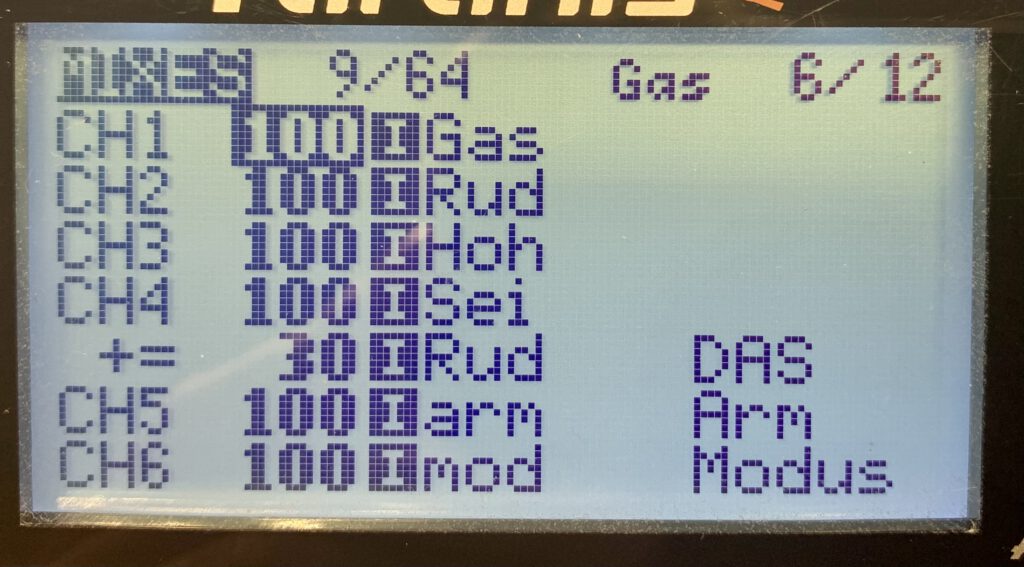
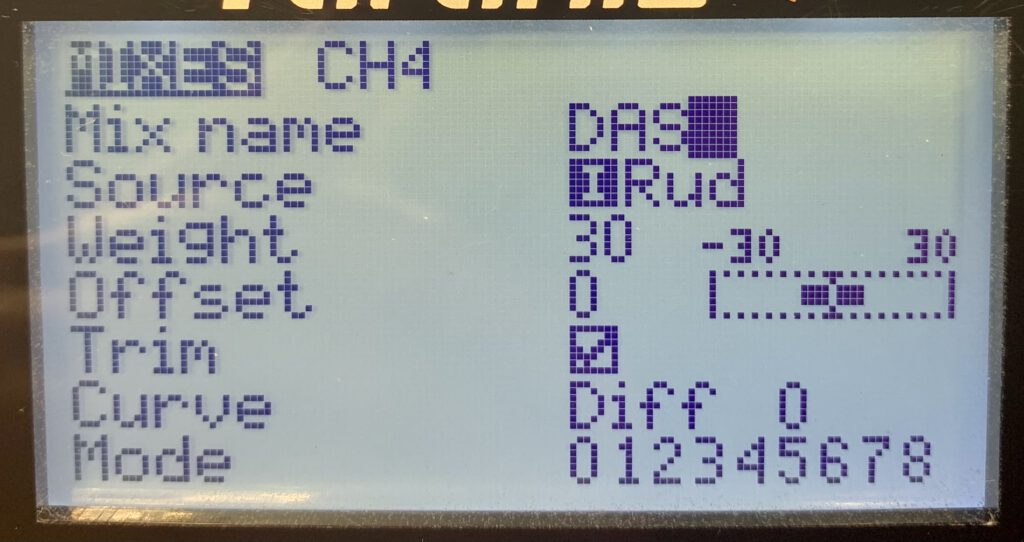
Legt in eurer Funkfernsteuerung ein neues Modell an. Navigiert nun in den Reiter „MIXER“. Hier fügt ihr bei Aileron/ Roll eine neue Zeile ein. Langer klick auf das Scrollrad -> „Insert after“. Geht auf Source und gebt an den Sticks ein wenig Roll ein. Der korrekte Kanal wird eingegeben. Wie viel Prozent Yaw ihr bei Roll mit ausführen wollt stellt ihr unter „Weight“ ein. Ich habe dem Mix noch den Name DAS -dual axis steering- gegeben.
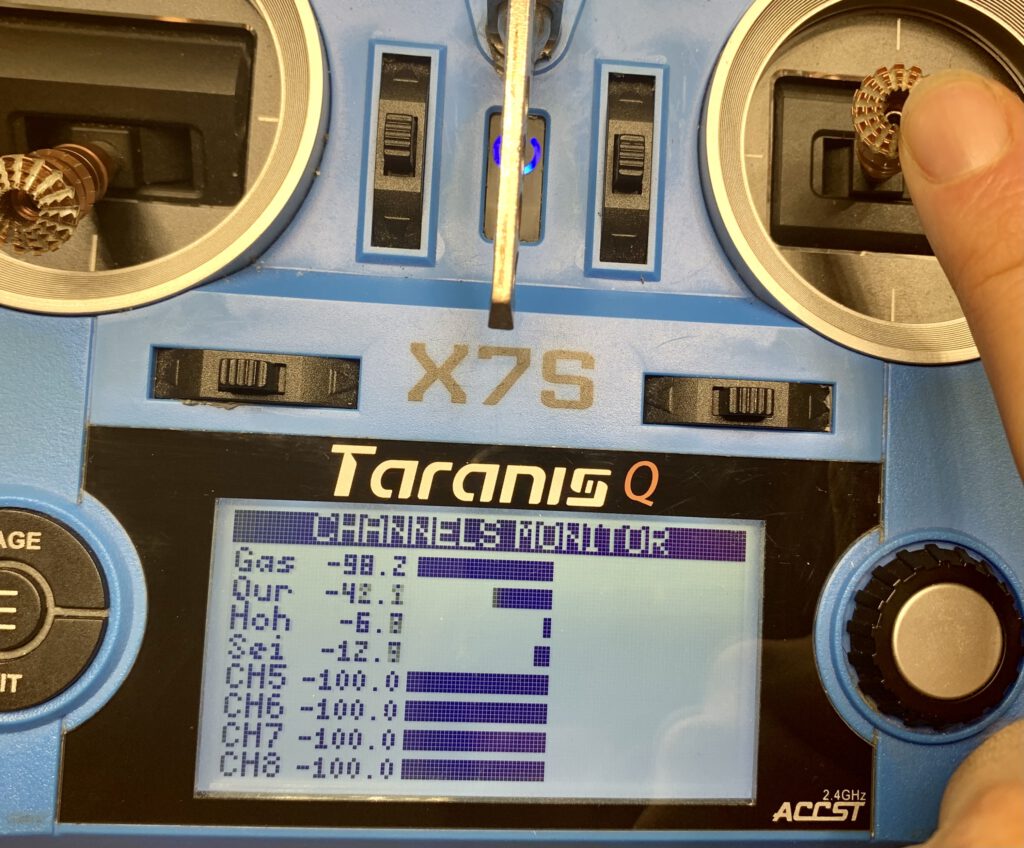
Kontrolliert nun die Einstellungen. Geht in den Channel Monitor und bewegt nur den rechten Stick für eine Roll-Bewegung. Der Yaw-Kanal sollte nun 30% der Roll-Eingabe abbekommen. In unten gezeigtem Beispiel wird als Channel Mapping TEAR verwendet. Beachtet das eure Funkfernsteuerung ggf. ein anderes Channel-Mapping verwendet.
Wie viel Weight ihr nutzt bleibt euch überlassen. Einige programmieren auch gern andersrum lieber Yaw in Roll hinein. Einfach „insert after“ bei Rudder/ Yaw klicken statt bei Roll.
Betaflight benutzt als Bezeichnungen für den Angle Mode „Level-Mode“ und für den NFE-Racemode „Level-Race-Mode“. Um den NFE-Racemode zu aktivieren gebt in der CLI
set level_race_mode = ON
ein. Speichern nicht vergessen.