Sensor Fusion wurde von Dominic Clifton (https://github.com/hydra) entwickelt mit dem Gedanken, dass zwei identische Gyro-Chips in unterschiedlicher Orientierung leicht unterschiedliche Daten generieren. Diese Daten werden vom Flight Controller zusammengerechnet und sollen jetzt ein „besseres“ Signal liefern als ein einzelner Gyro-Chip.

Dazu müssen zwei identische Gyro-Chips verwendet werden. Sollte auf einem Board z.B. ein einzelner ICM-Serie Gyro-Chip und ein MCU-Serie Gyro-Chip verbaut sein, kann man immer nur einen nutzen. Nicht beide zusammen. Unter Konfiguration -> Board- und Sensorausrichtung -> GYRO/ACCEL kann dann nicht „Beide“ ausgewählt werden.
Nice to know: Ein Gyro-Chip ist kein reines Gyroskop, sondern eigentlich 3-Achsen Gyroskop, 3-Achsen Accelerometer, Temperatursensor, programmierbare Filter.
https://www.memsjournal.com/2011/01/motion-sensing-in-the-iphone-4-mems-gyroscope.html
Wahrscheinlich ist die MPU-Serie besser, da die Filter hier eher zur Nutzung in Quadcoptern passen. Weder die ICM-Serie noch die MPU-Serie wurde für Quadcopter entwickelt. Die MPU-Serie ist ausgelaufen und wird nicht mehr produziert. Es gibt nur noch Altbestände.
Was bringt Sensor Fusion jetzt wirklich?
Getestet wurde unter üblichen Flugbedingungen mit solide getunten Quads (individuelle Filter/PIDs). Als Flugmanöver wurde ein typischer Einstell-Flug sowie viele Prop-Wash-Elemente und auch cinematische Bögen und gerade-aus-Flug geflogen. Es erfolgte je ein Flug mit dem ersten, dem zweiten und beiden Gyro-Chips. Projekt Steinadler ist mit 750g inkl. Akku ein etwas schwerer Vogel und für smoothen Freestyle Flug eingestellt. Ein angeschlagener Propeller macht keine Probleme. Projekt Wanderfalke ist ein ans Limit getunter Racer mit 480g, bei angeschlagenem Propeller sollte man lieber laufen, sonst brennt der Motor durch. (Akku: 6s 1550mah)
Testequipment: #
| Quad: | Projekt Steinadler | Projekt Wanderfalke |
| Style: | Freestyle HD | Race HD |
| Frame: | CMW Banggod 5 inch | Hyperlite Floss 3.0 lite |
| FC: | SP Racing H7 Extreme (30×30) | iFlight Succex-D Mini TwinG v2.1 (F7 20×20) |
| Gyro: | 2x ICM-20602 (Versatz 45°) | 2x ICM 20689 (Versatz 90°) |


Analyse (Blackbox und PID-Toolbox) #
Subjektiv konnte ich keinen gravierenden Unterschied im allgemeinen Flug feststellen.
Es zeigte sich ein Yaw-Glitching auf dem ersten Gyroskop von „Projekt Wanderfalke“. Den bemerkte ich im Flug nur einmalig an dieser Stelle. Bisher ist es mir in anderen Flügen nicht aufgefallen.
Ansonsten sind keine Auffälligkeiten zu verzeichnen gewesen.
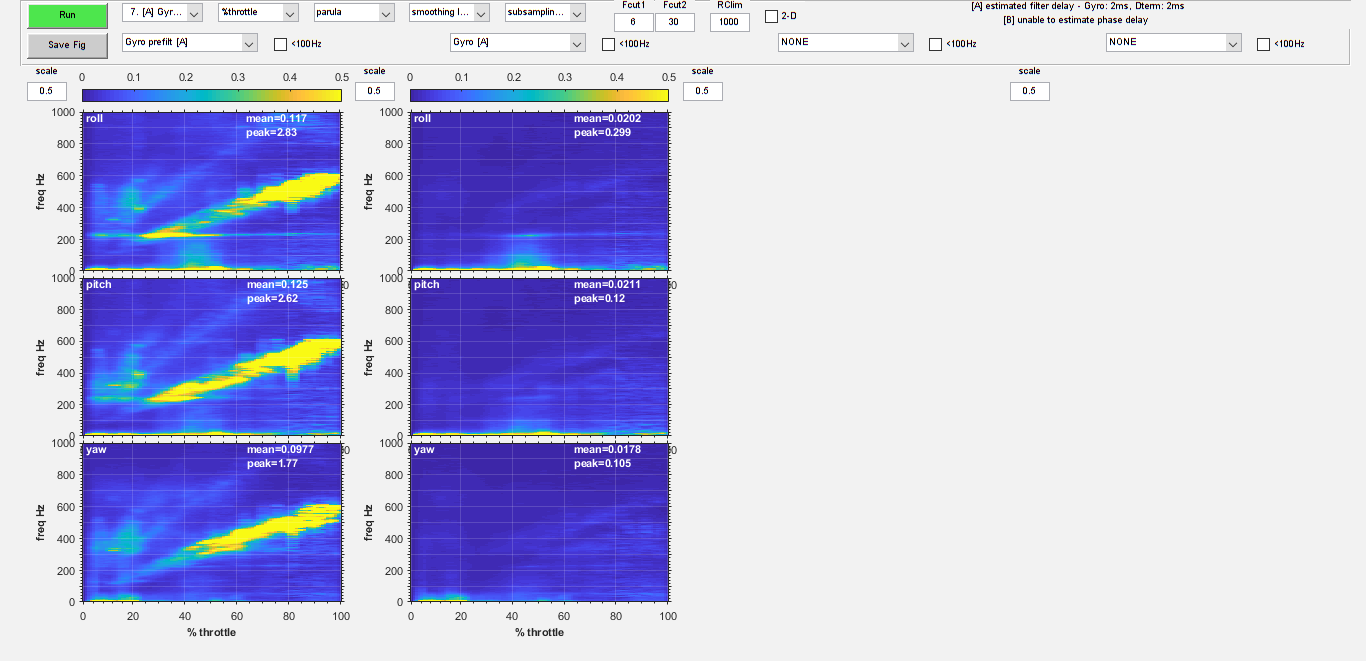
Steinadler, links erster Gyro, rechts zweiter Gyro:
Steinadler, beide Gyros (Fusion):
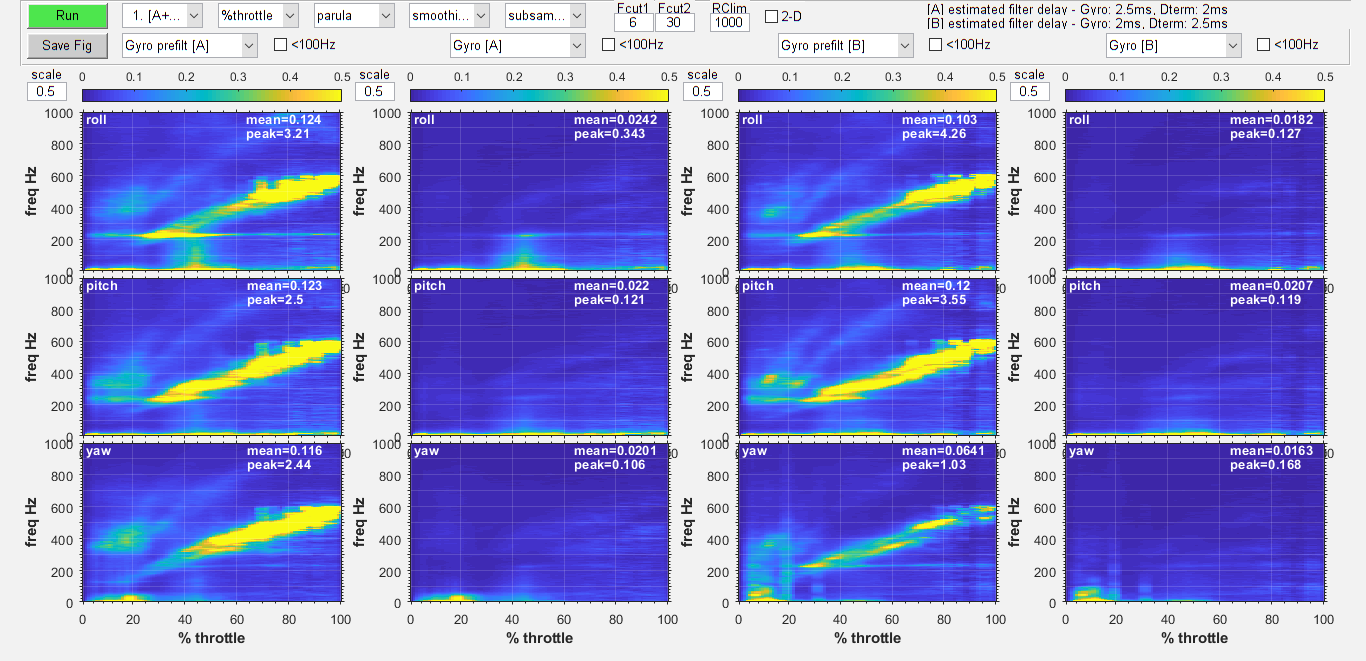
Wanderfalke, links erster Gyro, rechts zweiter Gyro:

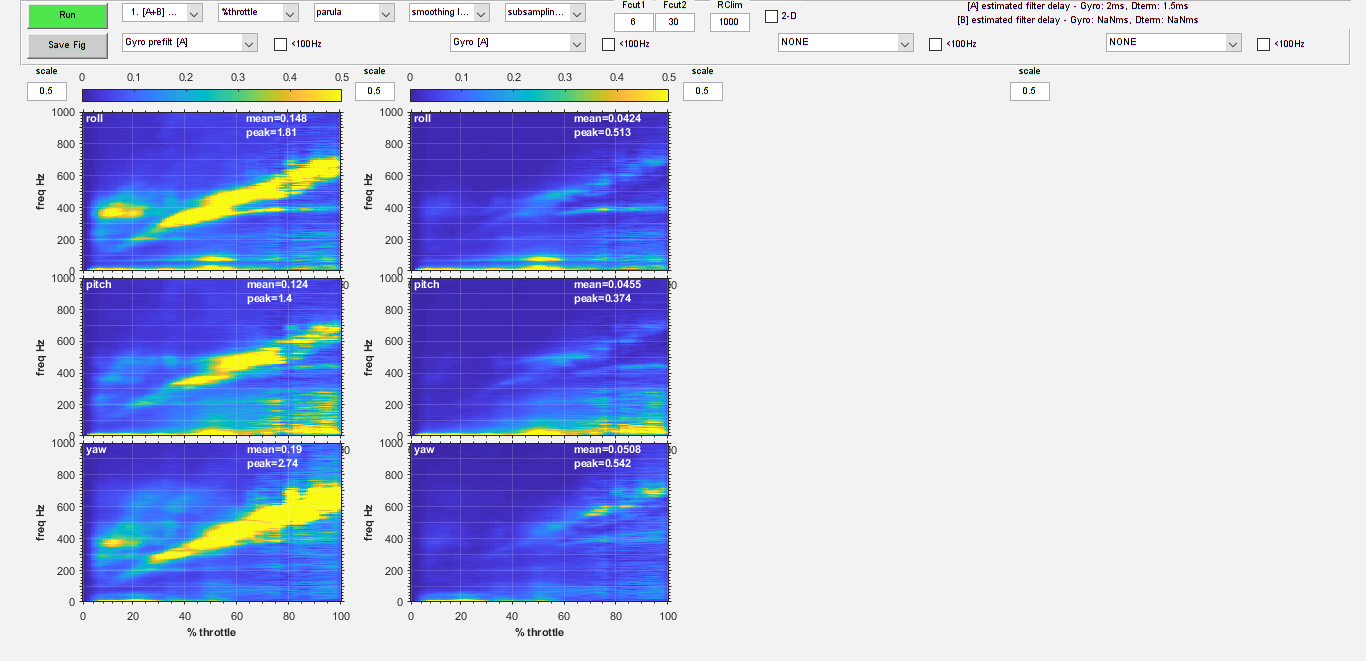
Wanderfalke, beide Gyros (Fusion):
Vergleicht man das durchschnittliche Rauschspektrum (mean) und die Spitzenwerte (peak) so ergeben sich bei Projekt Steinadler keine wirklich großen Unterschiede. Beide Gyroskope sind auf der einen oder anderen Achse etwas besser als das andere Gyroskop, aber keiner hat wirklich die Nase vorn. Die fusionierten Gyroskopdaten liegen wie erwartet in der Mitte.
Beim Projekt Wanderfalke fällt beim ersten Gyroskop auf der YAW-Achse das vertikale Band bei 45-50hz ins Auge. Dies ist der oben gezeigte YAW-Glitch. Bei genauer Analyse des Blackbox-Logs findet man in diesem Frequenzbereich immer wieder Wellen, die dann gern kummulieren. Auf der Pitch-Achse sieht man unter der 1. Motor-Fundamentalen ein deutlich erhöhtes Signalrauschen. Beides ist beim zweiten Gyro nicht vorhanden. Erstaunlicher Weise glätten die fusionierten Gyroskopdaten die Fehler des ersten Gyros ziemlich gut raus. Ja, das Noise-Level ist bei fusionierten Gyroskopen erhöht gegenüber dem zweiten Gyroskop alleine.
Bei guten Gyroskopen mittelt Sensor-Fusion ein durchschnittliches Signal und „homogenisiert“ die kleinen Unterschiede. In meinem Test war dies aber nicht signifikant, dazu lagen die Werte zu nahe beieinander.
Bei einem fehlerhaften Gyroskop kann Sensor-Fusion (wie in diesem Fall) den Fehler im Flug komplett eliminieren. Der Fehler wurde erst in diesem Test offensichtlich. Hier werde ich in Zukunft nur Gyroskop 2 verwenden. Ich kann den FC weiter verwenden statt einen neuen zu kaufen, oder mühevoll einen neuen Gyro-Chip aufzulöten.
Zusammenfassung #
Dual-Gyro-Boards mit Sensor-Fusion sind wirklich zu empfehlen. Man sollte sich aber die Mühe machen einmal in drei kurzen Testflügen die Gyros zu überprüfen, denn ein fehlerhaftes Gyroskop kann man tatsächlich mit Sensor-Fusion übersehen. Sensor Fusion mittelt die Werte der Gyroskope mit einfachem 2-Point-Averaging.
Natürlich ist die Aussagekraft dieses Tests eingeschränkt, da je drei Flüge mit zwei Quadcoptern wenig Daten ergibt.