Die PIDToolbox ist ein mächtiges und wichtiges Werkzeug, wenn man sich mit der Abstimmung und dem Tunen eines Copters widmen möchte. Führt einen Update auf die aktuellste Version 0.44 durch, die PIDToolbox wurde deutlich entschlackt und nur das wirklich wichtige und notwendige zum Tunen eines Copters sind noch vorhanden. Das macht die Nutzung deutlich einfacher. Abgesehen davon ist mit der V0.44 die PSD-Analyse hinzugekommen.
Dieser Artikel beschreibt die PIDToolbox und deren Funktionen. Hier beschreiben wir was die PIDToolbox an Funktionen zur Verfügung stellt und wie man sie nutzen kann. Welchen Zweck bzw. wie man sie für das Tunen letztendlich einsetzt haben wir in anderen Artikeln beschrieben. Diese Artikel werden entsprechend verlinkt.
Den Download findet ihr hier.
PID-Analyzer 0.52 vom Entwickler Plasmatree ist obsolet, bitte nicht verwenden.
Installation PIDToolbox #
Mac #
Während der Erstinstallation wird die Matlab-Runtime installiert, das kann je nach Mac eine ganze Zeit lang dauern.
- Erstinstallation: Matlab-Runtime installieren. ZIP file was downgeloadet wurde entdecken und in das Verzeichnis runtime_installation_file wechseln. Hier nun MyAppInstaller_web.app starten. Je nach MAC OS kann die Meldung erscheinen, das es sich um eine App von einem nicht verifizierten Entwickler handelt. Tritt der Fehler auf, dann in die Systemeinstellungen wechseln dort zu Sicherheit und am unteren Fensterrand „dennoch öffnen“ klicken. Sollte die App nicht automatisch gestartet werden, noch die App mit einem Doppelklick starten, jetzt sollte die Installation der Matlab-Runtime durchgeführt werden.
Bei einem Update von PIDToolbox muss die Matlab-Runtime nicht erneut installiert werden.
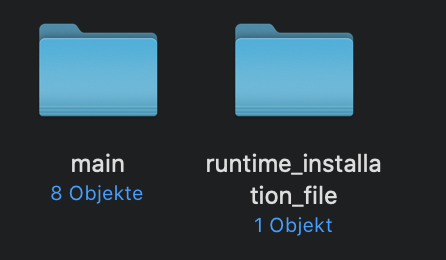

- Erstinstallation und Update : Mac-App installieren – Das PIDTOOL-Programm wird im Application Ordner des Macs gespeichert. In den Ordner „main“ wechseln und die Datei „PIDtoolbox.app“ in den Applicationordner (Programme) ziehen.

Tipp: Bei einem Update auf eine neue Version muss lediglich die App in den Programmordner gezogen werden. Möchtet ihr aber zusätzlich die alte Version behalten, dann einfach im Programmordner den Namen der PIDToolbox.app in PIDTooblx_V0.xy.app ändern und dann das neue Programm kopieren. Fortan habt ihr eine App PIDToolbox.app (aktuelle Version) und PIDTooblx_V0.xy.app mit der alten Version.
Mac-Besonderheit: Warum auch immer kann es sein, dass beim Starten der App der Splash-Screen nicht erscheint. Im Hintergrund wird PTB zwar gestartet aber man sieht es nicht. Einfach etwas warten, nach 20-30sek sollte dann die Applikation gestartet sein.
Arbeiten mit der PIDToolbox auf dem Mac
Normalerweise strukturiert man seine Logfiles auf seiner Rechner. Versucht man nun ein Logfile zu laden erscheint ggf. folgende Fehlermeldung:
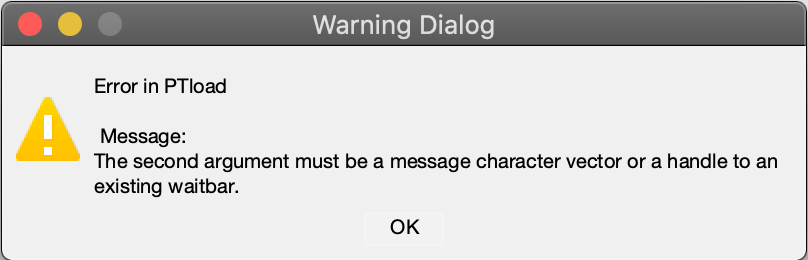
Hintergrund für diese Fehlermeldung ist das Fehlen der Datei „blackbox_decode“. Einfach diese Datei in jedes Verzeichnis kopieren indem Logfiles gespeichert werden, danach funktioniert das Laden einwandfrei. Tritt obiger Fehler auf muss PIDToolbox beendet werden und anschließend neu gestartet werden.
Windows #
Während der Erstinstallation wird die Matlab-Runtime installiert, das kann je nach PC eine ganze Zeit lang dauern.
- Erstinstallation : Matlab-Runtime installieren. ZIP file was downgeloadet wurde entpacken und in das Verzeichnis runtime_installation_file wechseln. Hier nun MyAppInstaller_web.exe starten. Je nach Systemeinstellungen kann die Meldung erscheinen, dass es sich um eine App von einem nicht verifizierten Entwickler handelt, einfach abnicken. Bei einem Update von PIDToolbox muss die Matlab-Runtime nicht erneut installiert werden.
- Erstinstallation und Update : Wechselt in den Ordner „main“ und kopiert den Inhalt auf einen beliebigen Ort auf eurer Systempartition (das Laufwerk wo Windows und Matlab Runtime installiert ist). Optimaler Weise solltet ihr auch hier die auszuwertenden Blackbox Logs ablegen.
Tipp: Nennt den Ordner zum Beispiel PIDToolbox und klickt mit der rechten Maustaste -> an Schnellzugriff anhelfen. So habt ihr den Ordner immer griffbereit.
Linux #
Es wird vorausgesetzt, das eine gewisse Linux-Erfahrung vorherrscht, daher wird hier nicht auf Einzelheiten eingegangen. Weiterhin wird auch nicht beschrieben, wie man PIDToolbox bzw. das Linux-Environment aufbereitet, sodass man ein Start Icon auf dem Desktop hat. Diese Installation geht davon aus, das die PIDToolbox über das Terminal gestartet wird.
Erstellt euch in eurem Home-Laufwerk einen Ordner in dem PIDToolbox später installiert werden soll. Download der Linux Software von hier und lokal speichern. Die Zip-Datei muss entpackt werden. Wechselt in den Ordner der gerade durch das Entdecken entstanden ist.
In den runtime Ordner wechseln und dort den MyAppInstall_web.install aufrufen. Nicht wundern, es sieht aus als ob nichts passiert. Aber der Prozess wird im Hintergrund gestartet und richtet sich ein (kann gerne mal 10-30sekunden dauern).
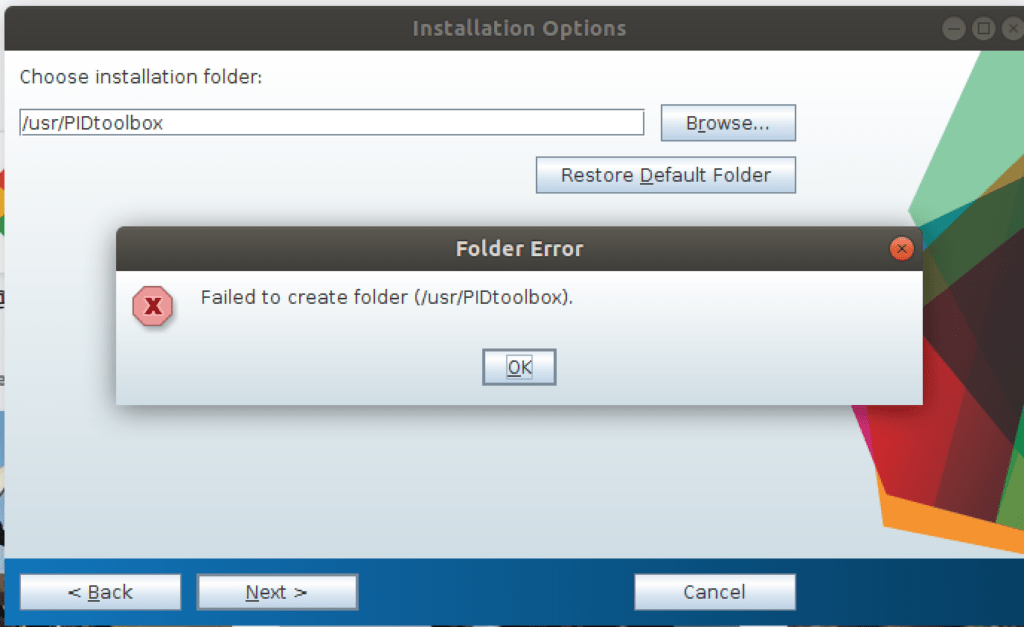
Das Defaultverzeichnis ist unter Linux nicht beschreibbar, solltet ihr es dennoch probieren, werdet ihr vermutlich diese Fehlermeldung erhalten. Über den Browse-Button könnt ihr den im ersten Schritt angelegten Ordner auswählen und dort wir nun die Software installiert. Der Installationprozess kann je nach Bandbreite eures Internetanschlusses länger dauern. Alleine für die Matlab-Runtime werden >800MB nachgeladen.
Die Matlab-Runtime ebenfalls im obigen Ordner mit installieren.
Ist die Installation abgeschlossen, solltet Ihr in Eurem Installationsordner folgende Unterverzeichnisse sehen. Wechselt nun in den Ordner Application.
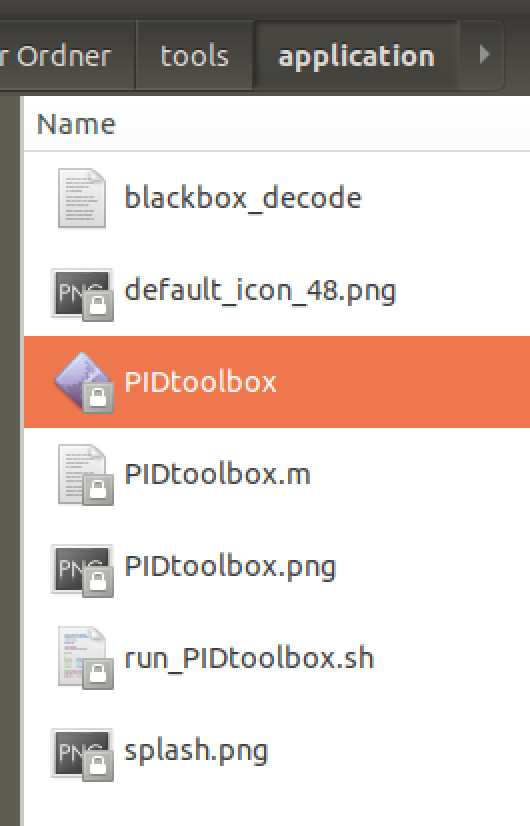
Im Application Ordner findet ihr nun diese Dateien. Unter Linux müsst ihr die PID-Toolbox mit „run_PIDtoolbox.sh <parameter>“ starten. Das ist wichtig, da über dieses Script der LD_LIBRARY_PATH gesetzt wird. Ohne diese Voreinstellung wird PIDtoolbox nicht starten

Öffnet nun ein Teminal-Fenster und wechselt in den Ordner. Der Aufruf muss wie folgt durchgeführt werden:
./run_PIDtoolbox.sh <pfad_zur_Matlabruntime>
Beispiel: ./run_PIDtoolbox.sh ../MATLAB_Runtime/v93/
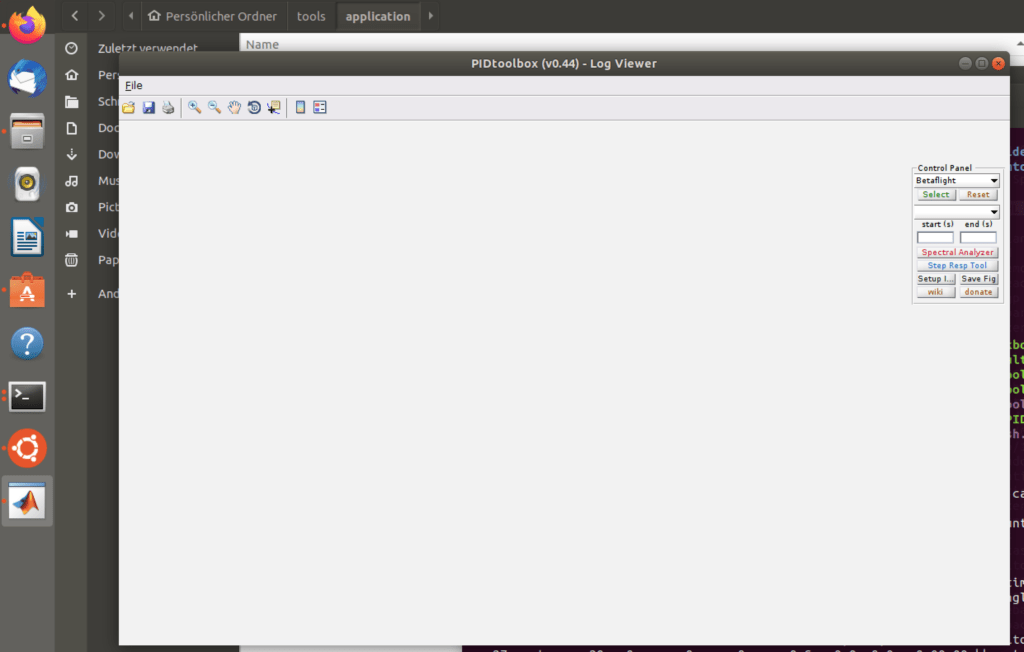
Wurde alles korrekt installiert und ihr habt den korrekten Pfad zur Matlab-Bibliothek angegeben, wird nach einigen Sekunden die PIDToolbox starten und dieses Fenster wird sich öffnen:
Tipp: Wie unter MacOS wird kein Splashscreen angezeigt, daher geduldig sein, im Hintergrund wird das Programm gestartet.
Bedienung #
Wenn PIDToolbox gestartet wird sieht man diesen Bildschirm. Auf der rechten Seite ist das Control-Panel. Es können gleichzeitig mehrere Logfiles geladen und dann verglichen werden. Dies ist perfekt um unterschiedliche Tuning-Einstellungen zu vergleichen.
Erstelle für jeden Einstellung während des Tunen ein eigenes Logfile. Das erreicht man, indem man nach jedem Flug den Lipo kurz abzieht und wieder ansteckt. Betaflight legt für den nächsten Flug ein neues Logfile an.
Benenne die Logfiles später am Rechner so, dass man anhand des Namens erkennen kann welche Anpassungen vorgenommen wurden. Beispiel: pdgain0.6.bfl, pdgain0.8.bfl, pdgain1.0.bfl, pdgain1.2.bfl
Tipp von Brian White (PIDToolbox)
Tipp: Beginne bei allen Logfile-Namen immer mit dem was man gemacht hat. Hintergrund ist eine bessere Lesbarkeit in PIDToolbox, da im Auswahlfeld nur eine begrenzte Anzahl von Zeichen angezeigt wird. Der Layout-Manager schneidet den Namen ab und man kann schlecht erkennen um welchen Dateinamen (Logfile) es sich handelt.
Beispiele für Logfilenamen (Präfix):
- pdgain_<value>.bfl : wenn man Einstellung rund um PD-Gain durchgeführt hat
- pdbalance_<value>.bfl : bei Einstellung rund ums PD-Balance
- dnf_<value>.bfl : Dynamic Notch Filter
- glpf_<value>.bfl : Gyro LowPassFilter
- usw.
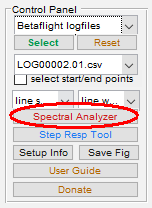
Control Panel #
Hier muss das passende Betriebssystem des FC ausgewählt werden, damit das Logfile korrekt decodiert wird.
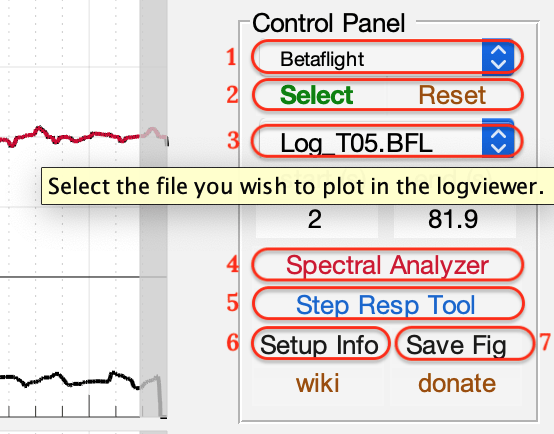
- Auswahl der FC Software
- Select-Button: Laden von bis zu 10 Logfiles. RESET-Button: zurücksetzen der geladenen Logfiles. Je nach Größe des Logfiles kann ein Import mehrere Minuten dauern.
- Log-Auswahlbox zeigt die Liste der geladenen Logfiles. Ein selektiertes Logfile wird Link in der Anzeige dargestellt
start(s)/end(s): Zeit von/bis die für eine Analyse betrachtet werden soll. Nicht zur Analyse genutzte Daten werden im Graphen grau dargestellt. - Spectral Analyzer startet das Werkzeug Spektral-Analyse
- Step Rep Tool startet das Werkzeug Step-Reponse
- Setup Info startet die Übersicht der FC-Konfiguration
- Save Fig speichert den aktuellen Graphen lokal auf der Festplatte
Graphen-Tool #
- Haus: Zurück kehren zum Ursprung
- Lupe (+/-) : Zoom Werkzeug.
- Hand: Man kann den Graphen bewegen
- Notiz: Data-Point setzen. Maus auf den Graphen bewegen und klicken. Nun erhält man den aktuellen Wert. Mit den Pfeiltasten kann man nun den Punkt auf dem Graphen bewegen. Sehr coole Funktion
- Pinsel: hiermit kann man Teile des Graphen hervorheben.
- Linkes Icon: Speichern des Graphen
Übersicht eines selektierten Logfiles #
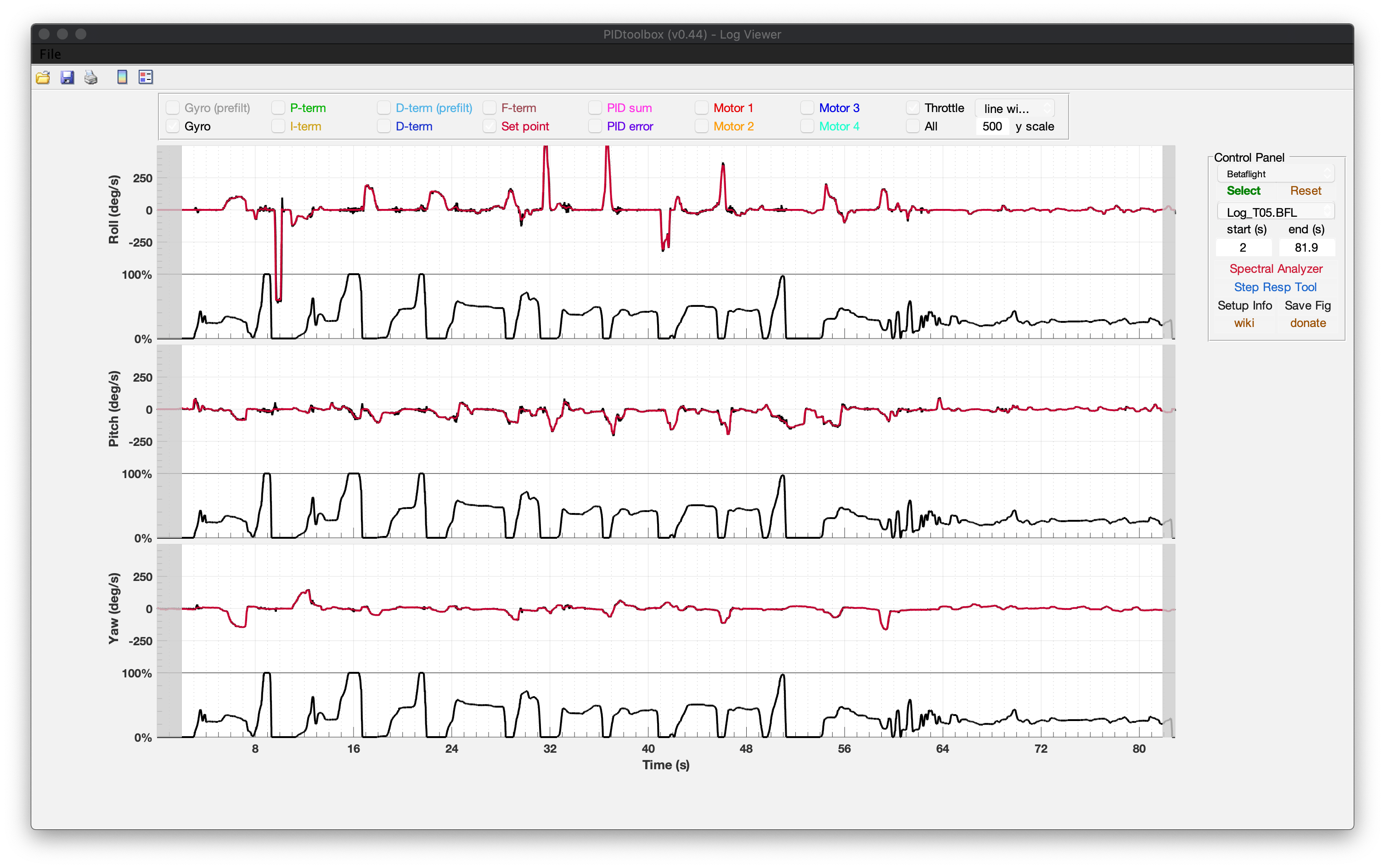
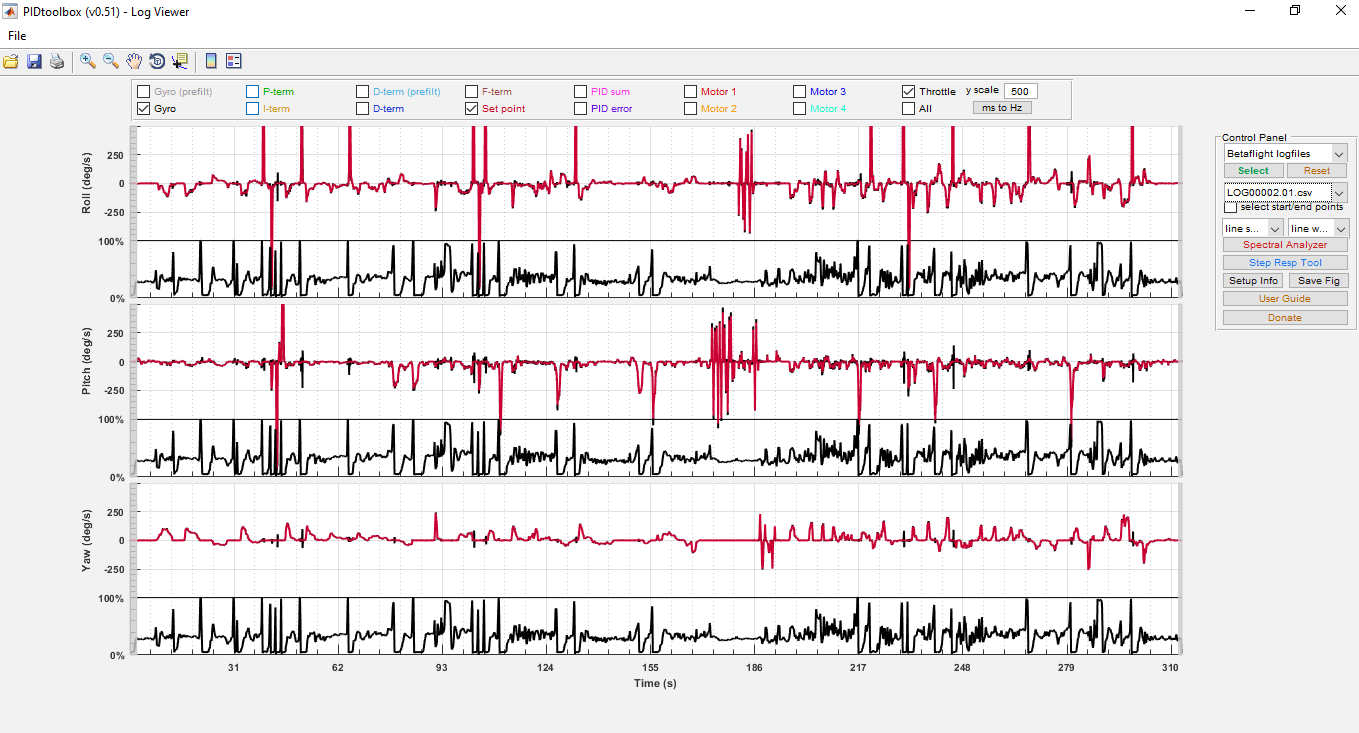
Sobald eine oder mehrere Dateien geladen wurden, wird eine Übersicht der unterschiedlichen Debug-Parameter angezeigt. Der obere Graph zeigt die Daten der Roll-Achse. Mitte ist die Pitch-Achse und unten die Yaw-Achse.

Über die Debug-Parameter können die unterschiedlichen Logdaten angezeigt werden. Die Default-Einstellung sind die oben dargestellten Werte. Im Graphen wird als Rot Kurve des Setpoint dargestellt, die schwarze Line sind die Werte des Gyros. Im zweiten Graph darunter der zeitgleiche Throttle-Setpoint. Die Graphen sind nicht normiert und somit im Vergleich mit anderen Logfiles nicht vergleichbar. Sie geben eine Auswertung über die Zeit zum entsprechenden Debug-Parameter.
Analyse-Werkzeuge #
Spectral Analyzer #
Spektralanalysen werden für das Filter-Tuning als auch für das PID-Tuning genutzt. Es erlaubt die Analyse des Signals von Interesse nach Intensität und bei welcher Frequenz und Throttlestellung welche Intensitätswerte (Amplitude oder Stärke des Signals) vorliegt.
Der Bereich zwischen 0-20 Hz stellt die echten befohlenen Bewegungen des Quadcopters dar. Also die Reaktion auf die Stickeingaben. Der Bereich zwischen 20-60 Hz stellt die echten Bewegungen auf Grund von Umwelteinflüssen dar: Prop-Wash, Wind, Turbulenzen, etc. Der Bereich zwischen 60-100 Hz ist eine Übergangszone mit schnellem Prop-Wash, starken Turbulenzen und Störungen.
Der Bereich über 100 Hz stellt (fast ausschließlich) Störungen dar. Es handelt sich hierbei um Resonanzen der Motoren, des Frames oder Anbauteilen wie GoPros oder Antennen. Ein Großteil der Schwingungen tritt tatsächlich (physikalisch) auf, ist jedoch nicht relevant, da unsere Motoren eh nicht so schnell reagieren können wie diese Störungen auftreten. Des Weiteren ist ein Teil der Störungen bedingt durch elektromagnetische Phänomene wie Induktion oder Rekuperation beim Abbremsen der Motoren. Das Gyroskop empfängt diese Spannungsschwankungen und fehlinterpretiert diese als Bewegungen.
3D – Heatmap #
Diesen findet ihr unter „Spectral Analyzer“ -> „Freq x Throttle“ ->
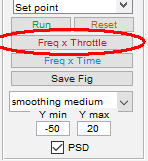
Abgebildet wird der auf der X-Achse der Throttle-%-Wert, die Y-Achse zeigt die Frequenz an und die Farbgebung die Amplitude (also die Stärke/ Intensität) des Signals. Es wird empfohlen das Farbschema „parula“ zu nutzen da dies von blau über grün nach gelb dem menschlichen Auge die höchste Detailauflösung bietet. Je intensiver gefärbt (gelb), desto höher die Amplitude, desto intensiver ist auch das Signal.
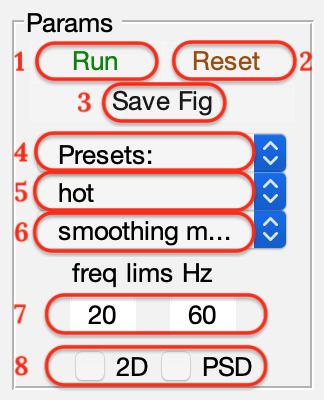
- Button Run: startet die 3D-Heatmap-Analyse
- Button Reset: setzt alle Einstellung zurück
- Button Save Fig: speichert die aktuelle Darstellungen als Bild-Datei
- Auswahl Presets: vorgefertigte Auswahl von Debug-Parametern
- Auswahl Anzeigefarbe: Obige Bilder in Blau ist „parula“ (Empfehlung)
- Auswahl Qualität: smoothing low ist zu empfehlen
- Frequenz Limit Hz: Analyse in diesem Frequenzspektrum (von/bis) für Analyse <100 Hz (Propwash)
- Auswahl 2D / PSD: 2D = Anzeige als 2D-Graph FFT und PSD
Presets
Presets stellen auf eine schnelle Art mögliche Vergleichsanalysen in der 3D-Heatmap zur Verfügung.
Preset 1-3: gelten für ein einzelnes Logfile und stellen vier unterschiedliche Debug-Parameter dar
Preset AA|BB 4-5: vergleichen zwei Logfiles miteinander, Spalte 1+2 sind aus Logfile A und Spalte 3+4 aus Logfile B. Pro Logfile werden zwei unterschiedliche Debug-Parameter dargestellt. Diese Parameter gelten für beide Logfiles.
Preset 6-9 : A|B|C|D vergleichen vier Logfiles mit jeweils einem Debug-Parameter.
Natürlich kann man auch ganz individuell seine eigenen Auswertungen pro Spalte definieren, diese werden aber nicht für weitere Auswertungen zwischengespeichert und müssen neu eingestellt werden (beim nächsten Neustart von PTB)
Smoothing
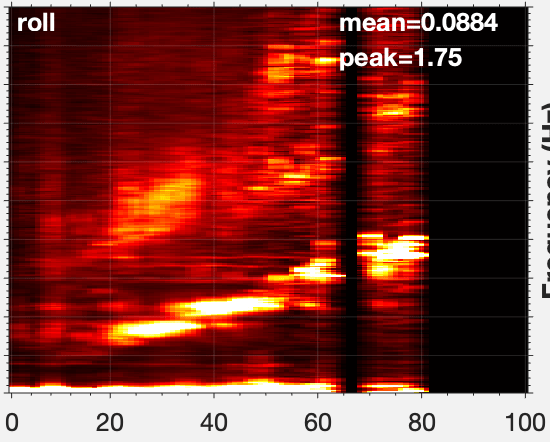
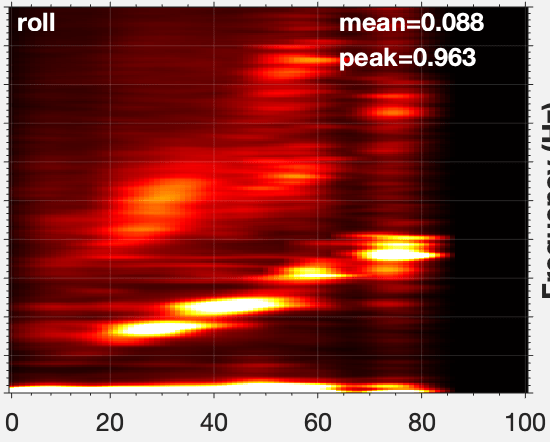
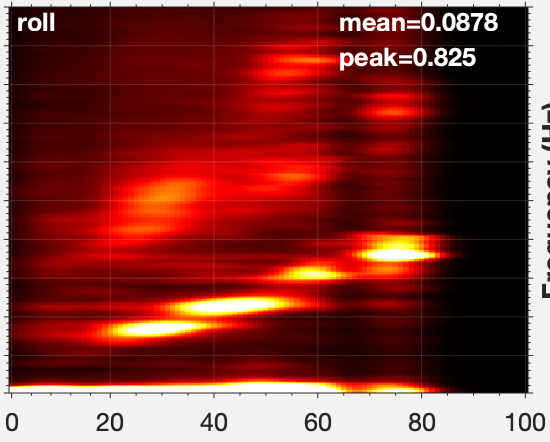
Man beachte – zwischen den verschiedenen Smoothing Varianten ändert sich mean/peak. Das liegt daran, das in einer geringeren Auflösung (Low) Werte entsprechend gerundet werden, daher ist der Peak bei Low auch mehr als doppelt so hoch wie bei high.
Wichtig: wenn ihr Analysen durchführt, dann immer die gleiche Auflösung verwenden. Ich empfehle für die größte Präzision smoothing auf low zu belassen.

Roll, Pitch, Yaw
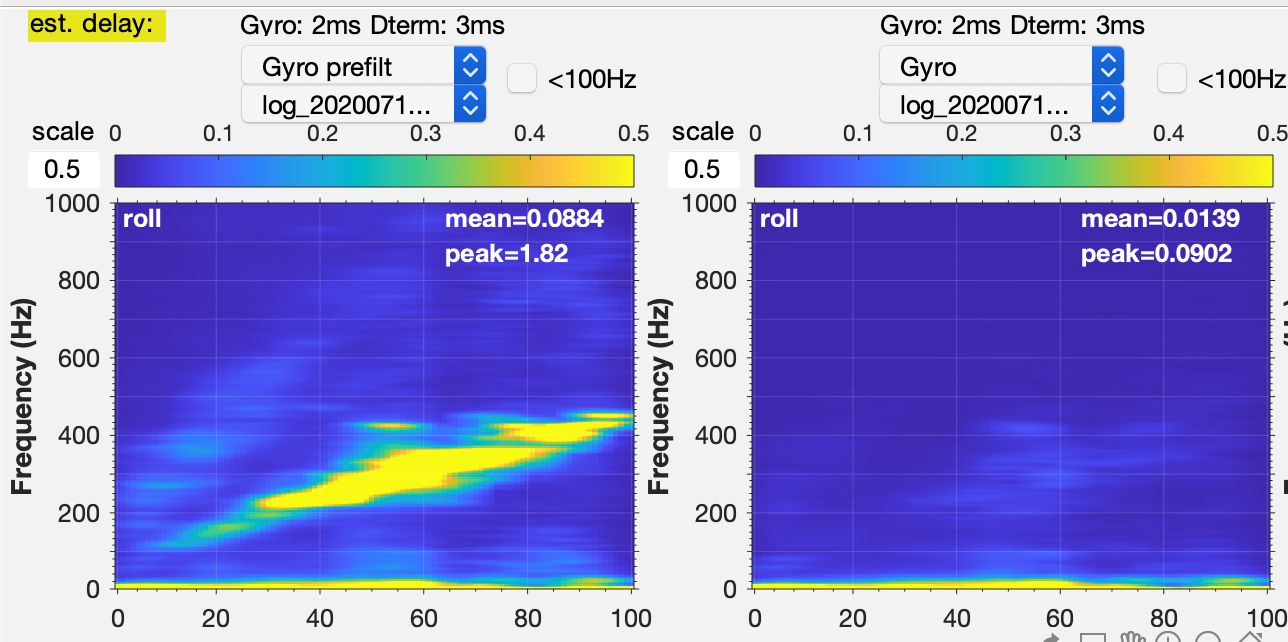
Linkes Bild: Zeigt alle Darstellungen der 3D-Heatmap. Waagerecht ist die Achse, Senkrecht ist der jeweilige Debug-Parameter.
Rechtes Bild: Detailanzeige. Links Gyro prefiltered und rechts Gyro gefiltert. In der Regel möchte man während des Tunens die ungefilterten mit den gefilterten Daten vergleichen, oder Logfile A mit Parameter X und Logfile B mit Parameter X vergleichen um abschätzen zu können welche Auswirkung die Filter- oder PID Anpassung hat.
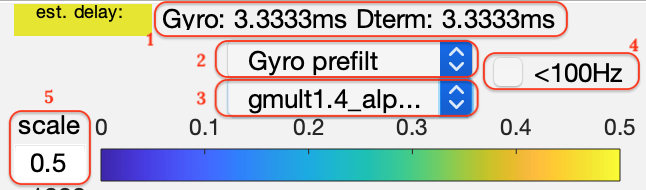
- Latenz: Anzeige der Latenz des Gyros & des D-Terms. Diese Zeit sollte < 5ms kurz sein. Racer möchten hier möglichst wenig Latzenzzeit haben. Cinematic-Piloten möchten einen ruhigen Flug, daher ist die Latenzzeit i. d. R. auch höher (da mehr Filterung). Die Anzeige stellt eine ungefähre Schätzung dar und ist alles andere als genau.
- Auswahl: Debug-Parameter der angezeigt werden soll (Default Preset: Gyro prefiltered & Gyro)
- Auswahl: Logfile. Hier können entweder bei einem Logfile unterschiedliche Debug-Parameter ausgewertet werden und verschiedene Logfile mit den gleichen Debug-Paramter.
- <100Hz-Analyse: wenn Häkchen gesetzt, wird eine Heatmap im Frequenzbereich bis 100Hz angezeigt. (Propwash-Analyse)
- Scale: Skalierungsfaktor für die Heatmap. Je kleiner die Zahl, je höher der Skalierungsfaktor. Default 0.5
- Farbskala: je heller (gelber) desto intensiver das Signal. Farbgebung.
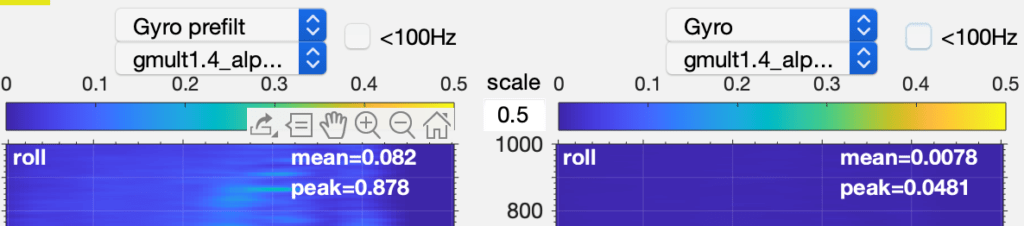
- mean: durchschnittliche Intensität des Signals. Linkes Bild: ungefiltertes Gyrosignal, rechts Bild gefiltertes Gyrosignal. Je kleiner desto besser.
- peak: Spitzenwerte der stärksten Intensität des Signals.
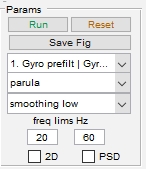
<100Hz-Analyse
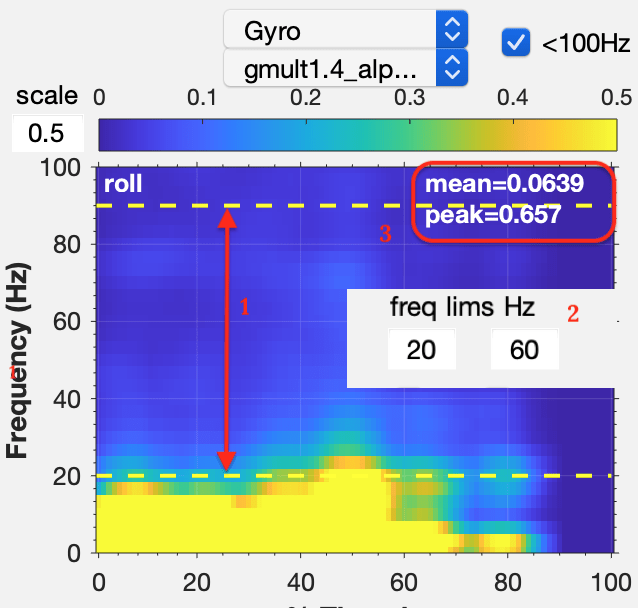
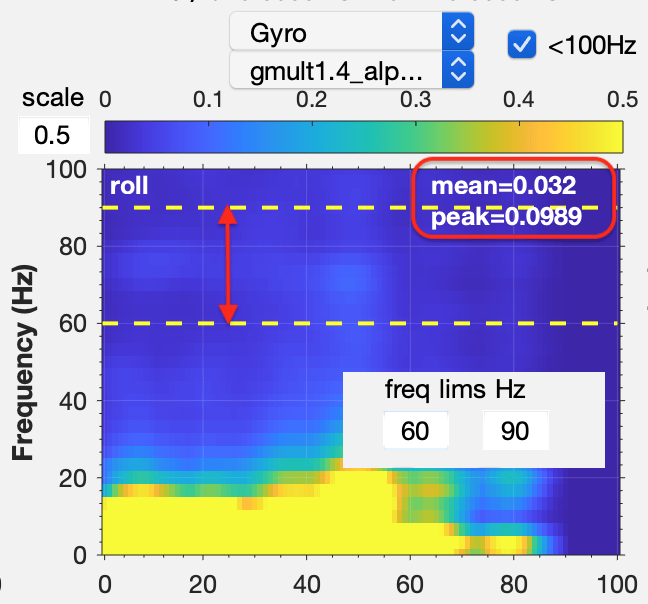
- (1) Gestrichelte Linien: Zwei gestrichelte gelbe Linien markieren den zu analysierenden Bereich
- (2) Frequenzeinschränkung: Über Einschränkung des Frequenz-Limits kann der zu analysierende Bereich eingeschränkt werden.
- (3) mean/peak : basiert auf den eingestellten Frequenzbereich (zwischen den beiden gestrichelten Linien)
Die Standardeinstellung analysiert das typische Frequenzspektrum für den Prop-Wash-Bereich. Eingrenzen kann man den Bereich um zum Beispiel eine Frameresonanz zu beurteilen und ob bauliche Veränderungen (zum Beispiel Braces zwischen den Armen) diese verbessert hat.
2D FFT – Fast-Fourier-Transformation #
Die Fast-Fourier-Transformation ist gut geeignet um das Signal von Interesse nach der Frequenz zu analysieren. Die FFT-Analyse zeigt Vibrationen bei bestimmten Frequenzen sehr deutlich. Im Prinzip kann man sich die FFT-Darstellung zur Heatmap so vorstellen: die Stärke des Signals (die Amplitude oder Färbungsgrad) wird auf der Y-Achse darstellt wird und die X-Achse zeigt die Frequenz. Die Anzeige ist linear. Problem: die FFT Analyse geht davon aus, dass das Signal aus einem Gemisch von mehreren periodischen Schwingungen besteht. Dies ist zum Beispiel beim RC-Link der Fall. Hier trägt eine Grundschwindung andere Schwingungen und überträgt damit Informationen. Beim Gyroskop oder D-Term Signal liegt aber ein Gemisch aus unzähligen nichtperiodischen Schwingungen vor. Daher ist die FFT Analyse nur schlecht geeignet um diese Signale zu beurteilen.
2D PSD – Power Spectral Density #
Dieses Feature ist ab Version 0.44 neu hinzugekommen. Die spektrale Leistungsdichte ist eine Möglichkeit die Leistung eines Signal bezogen auf einen Frequenzbereich in Dezibel anzugeben und zeigt so die Intensität. Die Anzeige ist logarithmisch. Durch diese Darstellung, wird das Tuning und der Vergleich mit vorhergehenden Tuningflügen genauer.
Die PSD-Analyse eignet sich um „zufällige“ oder nichtperiodische Schwingungen (Vibrationen oder Prop-Wash) die im gesamten Frequenzspektrum auftreten zu analysieren und zu charakterisieren. Sie beschreibt die Energieverteilung eines Signals über verschiedene Frequenzen. In PIDToolbox wird db (Dezibel) verwendet. Durch die PSD wird eine Normalisierung erreicht – und genau das ist der riesige Vorteil der PSD-Darstellung – so können wir unterschiedliche Logfiles miteinander in Bezug setzen und vergleichen. Übrigens, wird diese Technik Normierung in den meisten Auswertungen der PIDToolbox verwendet, sonst könnte man auch Logfiles nicht bzw. nur sehr schwer miteinander vergleichen. Die X-Ache zeigt die Frequenz und die Y-Achse die entsprechende Leistung.
Vereinfacht gesagt, mit PSD sehen wir besser (genauer) wie sich das komplette Signalspektrum verteilt.
Setzt bei den Analysen für Vergleiche immer den Haken bei „PSD“. Das macht euch die Analyse deutlich genauer. Kleine Faustregel: je näher die Ausschläge an die 0-Linie heranreichen umso „lauter“ die Vibrationen. Die PSD-Darstellung ist weitgehend unabhängig von der Länge des Logfiles und der eingestellten liegenden Lograte in Betaflight.
Beispiel: #
Daten des Gyro-Prefiltered (also Rohdaten des Gyros) – hier der Roll-Achse. Darstellung als FFT-2D Spektrum. Hier am Beispiel von zwei Logfiles des gleichen Copters nach einer Anpassung der Filter. (Rot = erstes Log, Dunkelrot = zweites Log)
Analyse mit FFT-Diagramm (2D-Spektraldiagramm)
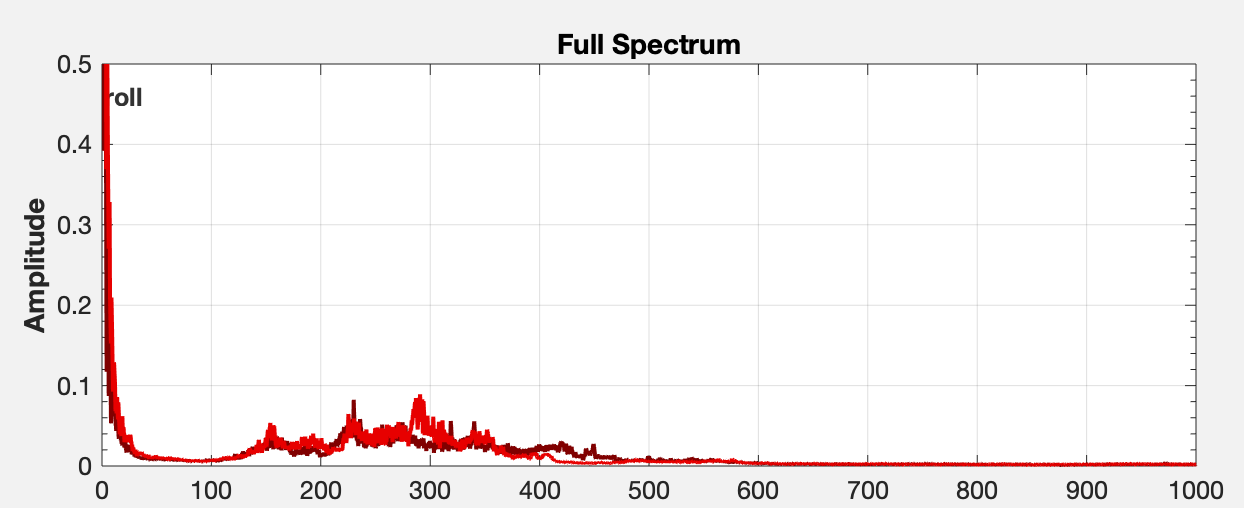
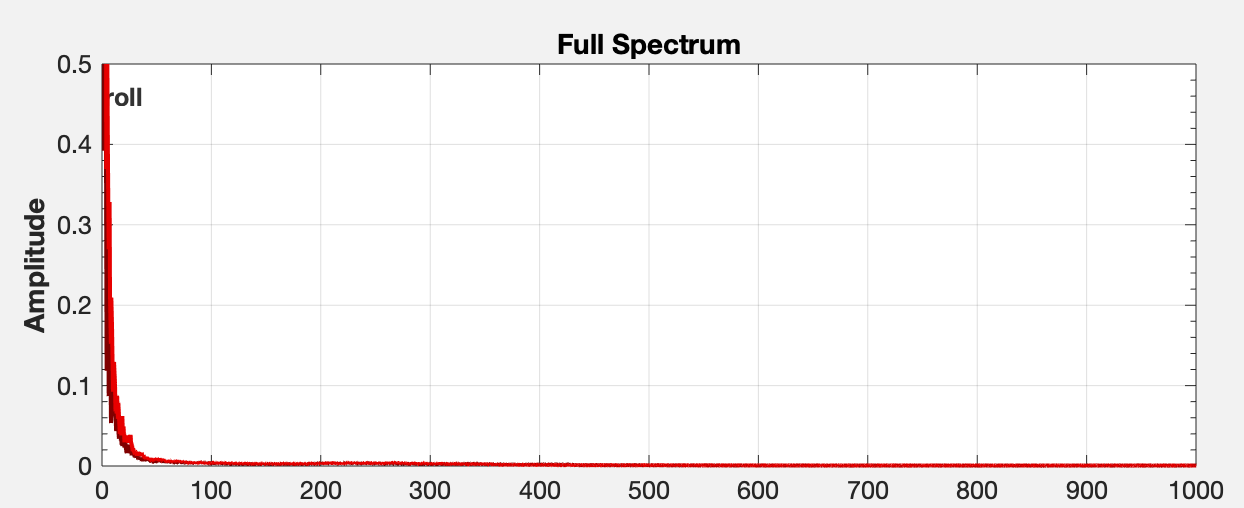
Man sieht deutlich, dass von 150 Hz bis 450 Hz Vibrationen vorhanden sind. Diese werden durch die Filter in Betaflight (zweites Bild) sehr gut ausgefiltert. Deutlich zu sehen ist der Signal-Peak bei ca. 280hz gibt. Einen großen Signalunterschied im gefilterten Signal beider Logs kann man nicht erkennen.
Analyse mit PSD-Diagramm (2D spektrale Leistungsdichte)
Dieses Diagramm beruht auf den gleichen Daten wie das vorherige FFT-Diagramm, zeigt aber das „Band“ in dem die Vibrationen stattfinden deutlicher.
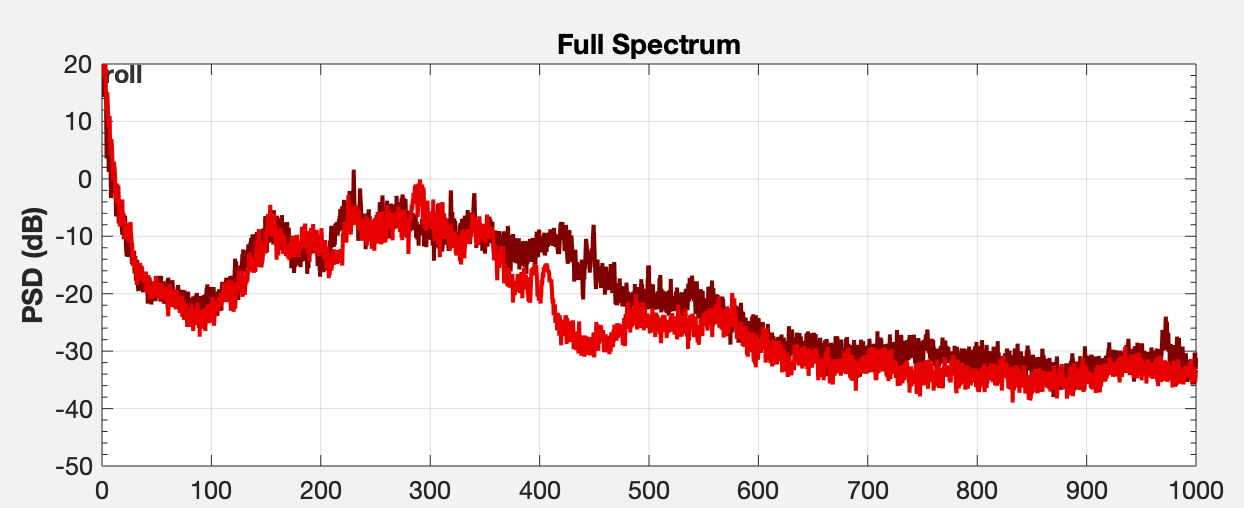

Im ersten Diagramm (Gyro-Prefilt) sehen wir die Daten ungefiltert, im zweiten Bild die gefilterten Gyro-Daten. Wie man sieht ist zwischen dem Logfile 1 + 2 ein Unterschied zu sehen, den man in der FFT Analyse nicht sehen konnte.
Die neue Darstellung über das PSD-Tool ermöglicht es nun verschiedene Logfiles während eines Tunings besser zu vergleichen, basierend auf die Normierung der Daten. Nur so ist ein suffizienter Vergleich möglich.
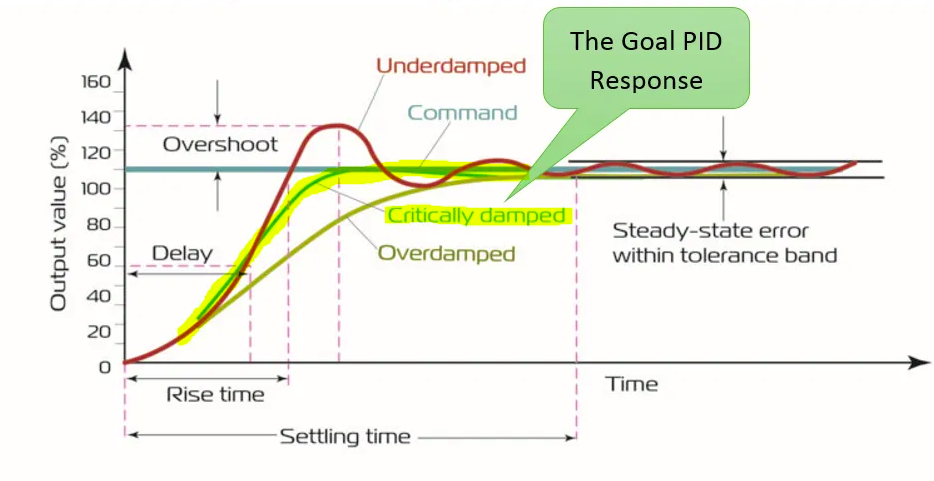
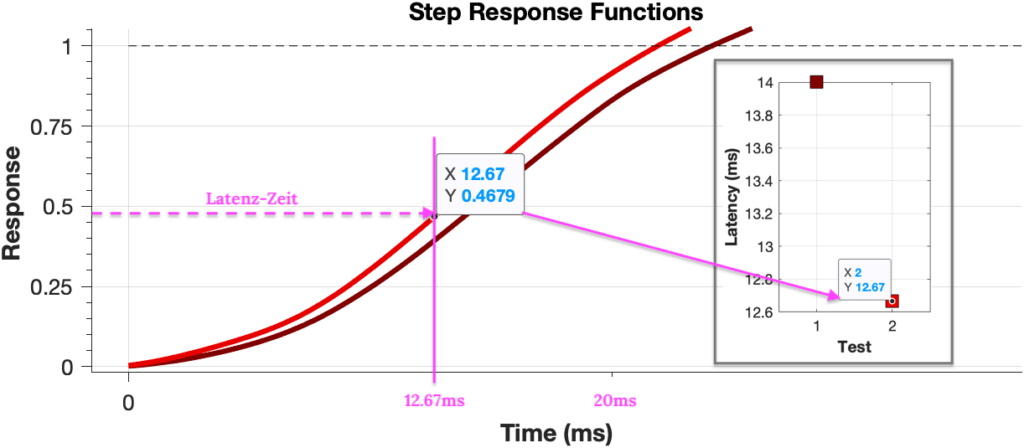
Step-Response-Analyse #
Sie Step-Response errechnet wie der Quadcopter auf eine Signaländerung reagiert. Theoretisch wird angenommen das in unendlich kleiner Zeit der Steuerknüppel von 0 auf 1 springt. Angezeigt wird wie schnell der Quadcopter hierauf reagiert. Der Wert „Peak“ zeigt an wie viel der Quadcopter über das Ziel hinaus schießt. Die Peak-Time zeigt an wie lange das Überschießen anhält. Der wichtigste Wert ist die Latenz, also wie schnell der Quadcopter die befohlene Lage im Raum im Durchschnitt erreicht. Je niedriger desto besser.
Racer wollen möglichst wenig Latenz, ein wenig Overshoot wird dafür gern in Kauf genommen.
Cinematische Flieger wollen smoothen Flug ohne Überschießen, hier ist ein wenig höhere Latenz kein Problem.
Freestyler liegen mit ihren Anforderungen dazwischen. Ein Pilot der Fast-Freestyle fliegt will eher racer-ähnliche Einstellungen („harte“ PIDs). Wer flowy/ smooth fliegt will eher „weiche“ PIDs wie ein cinematischer Flieger.
Über „Select Files“ können bis zu 10 Files für einen Vergleich herangezogen werden. Sobald der Run-Button gedrückt wird, werden die jeweiligen Graphen generiert, getrennt nach Achsen. Anhand der Färbung des Graphen kann man das entsprechende Logfile erkennen. Die Farben können leider nicht manuell angepasst werden. Links neben der Logfile-Liste sieht man die korrespondierenden PID-Werte, den D-Min-Wert und den FF-Wert (FeedForward) der jeweiligen Log-Files. N gibt die Anzahl der erkannte Eingabebefehle an. Ziel ist eine Step Response möglichst nah an der critically damped Linie:
Die beiden nachfolgenden Bilder zeigen 6 kurze Tuning-Flüge mit Anpassungen des PDGain, beginnend bei 0.6 bis 1.6 in 0.2er Schritten. Man sieht deutlich die Verbesserungen in den Kurven. Der linke Graph mit den Kurven zeigt das Verhältnis wie schnell der PID-Controller den Setpoint (die 1-Linie erreicht). Im Beispiel sieht man aber deutlich, das ein Tunen nur über die Slider nicht das Optimum erreicht werden kann. Klarer Indikator ist, das das Ansprungverhalten von Roll und Pitch sich deutlich unterscheidet – und das merkt man auch im Flug. Die beiden unteren Grafiken zeigen das Ansprechverhalten der Roll- und Pitch-Achse in den ersten 100ms. (Klick auf die (+) Lupe über dem Graphen.
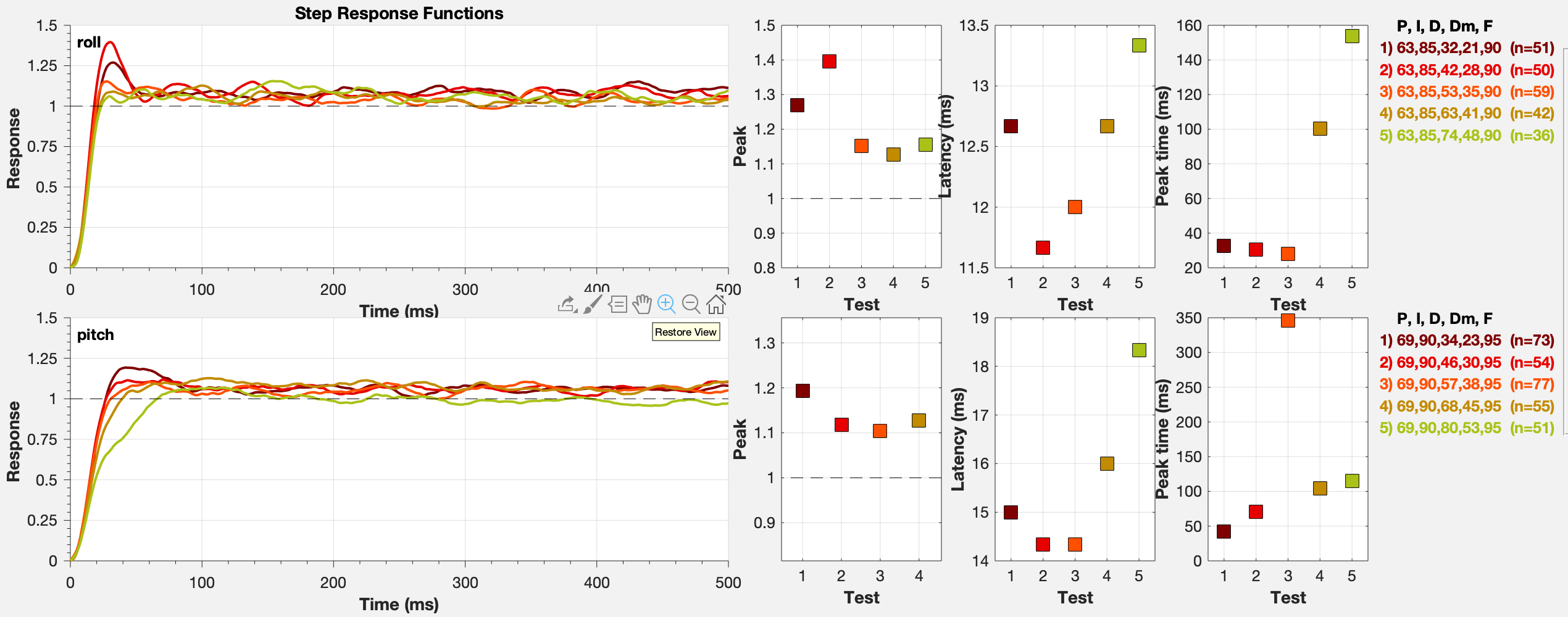
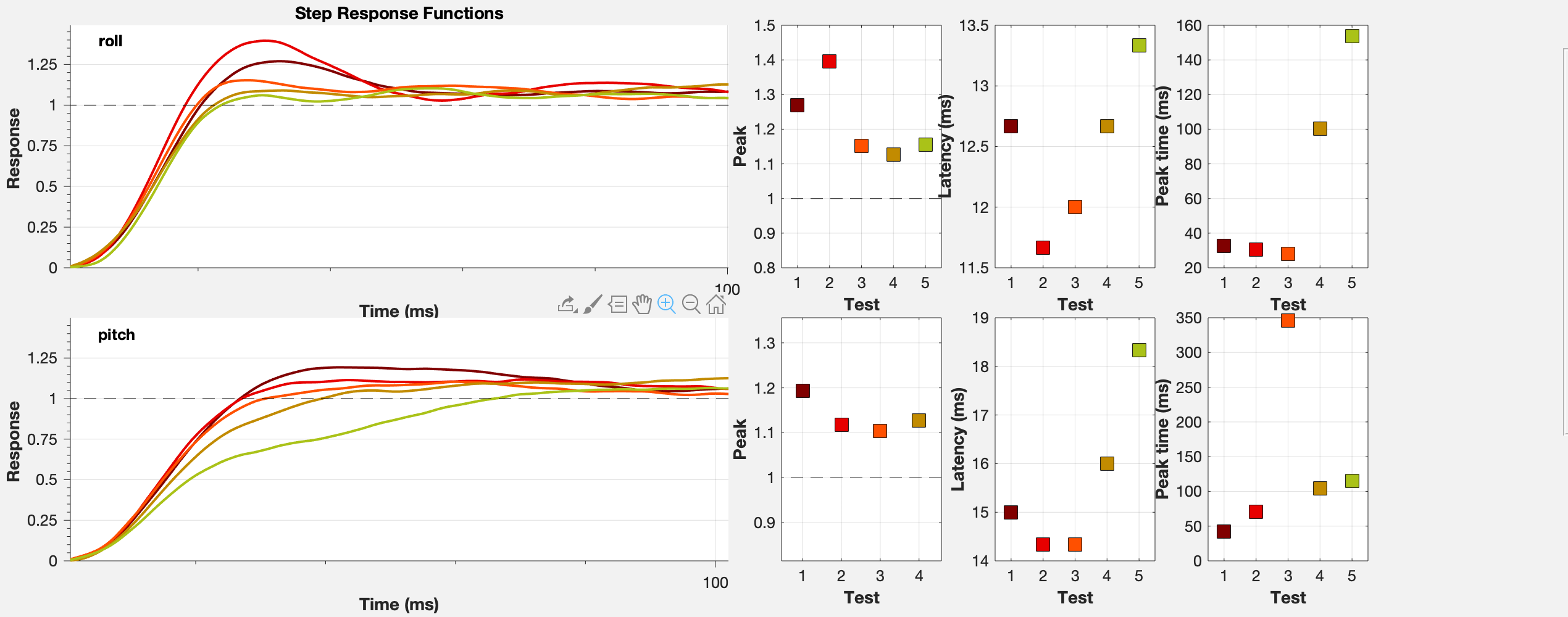
Wir betrachten die Werte in der Reihenfolge: 1. Latency, 2. Peak und 3. Peak time. Zusätzliche zum Ansprungverhalten wird pro Achse noch folgende Informationen (Graphen) bereitgestellt.
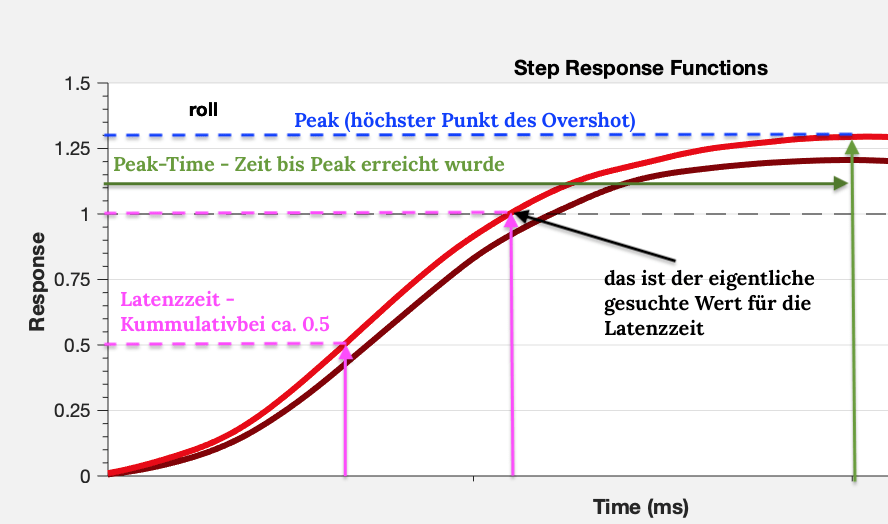
- Peak: ist der maximale Ausschlag der Kurve (der Overshot), dieser sollte so klein wie möglich sein, dies ist aber nur am 2. wichtigsten. Im Beispiel sieht man PDGain 0.8, PDGain 1.4 und PDGain 1.6 die niedrigsten Peak haben.
- Latency: Zeit von 0 bis durchbrechen der 1 – Response Linie. Um die Berechnung aber auch dann durchführen zu können, wenn ein Graph die 1-Linie gar nicht erreicht wird die Latenz-Zeit basierend auf dem kumulativen-Mean-Wert berechnet. Dieser Wert liegt ungefähr bei der 0.5er Linie. Die Latenz sollte so klein wie Möglich sein, dieser Wert ist am wichtigsten. Hier ist PDGain 0.8 klar abgeschlagen, PDGain 1.4 und PDGain 1.6 sind die besten. Ziel: je schneller desto besser.
- Peak time – Zeit bis der Gipfel der ersten Peakwelle erreicht wurde. – Dieser Wert ist weniger wichtig, kleiner ist besser.
Setup-Info – FC-Konfiguration #
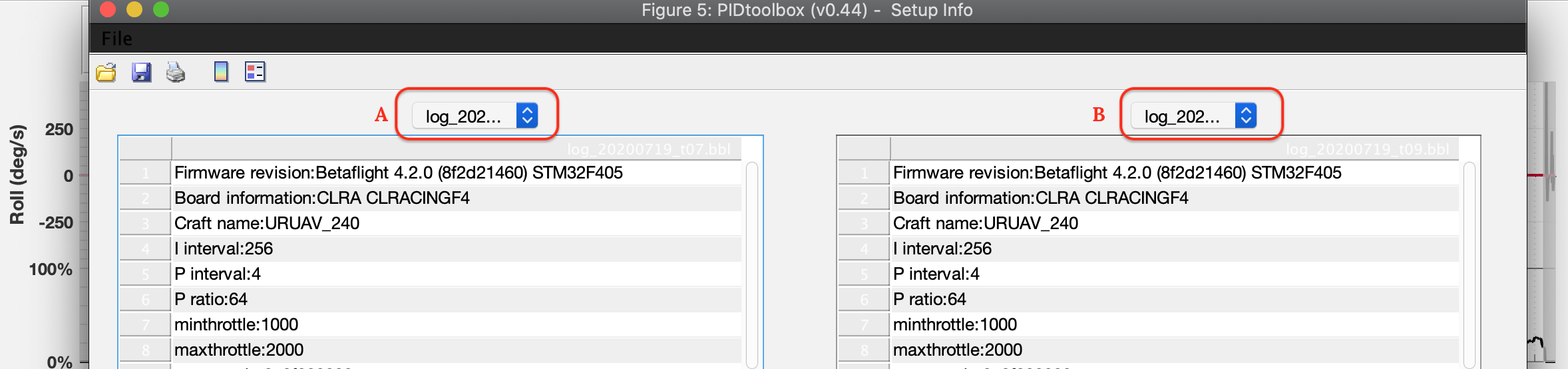
Im Bereich Setup-Info kann man zwei beliebige geladene Logfiles (Auswahl A und B) miteinander vergleichen, das spart einem alles aufzuschreiben. Leider werden Unterschiede nicht farblich markiert, dadurch sieht man geänderte Einstellungen nicht auf den ersten Blick. Vielleicht wird dieses Feature in einem der nächsten Versionen bereitgestellt.
Weiterführende Informationen #
Einführung zu den Funktionen findet ihr auf Brian Whites Youtube Kanal:
Co-Autor: Lunax