Grundlegendes #
Quelle: https://www.bitcraze.io/2015/02/measuring-propeller-rpm-part-3/
Unser PID-Controller ist sehr gut wenn ein lineares System zu kontrollieren ist. Nehmen wir als Beispiel eine Kugel auf einer Wippe die wir an einen bestimmten Punkt auf der Wippe einpendeln wollen. Wäre die Kugel oval und würde unregelmäßig rollen hätte der PID-Controller seine Not die Kugel in die gewünschte Position „zu wippen“.
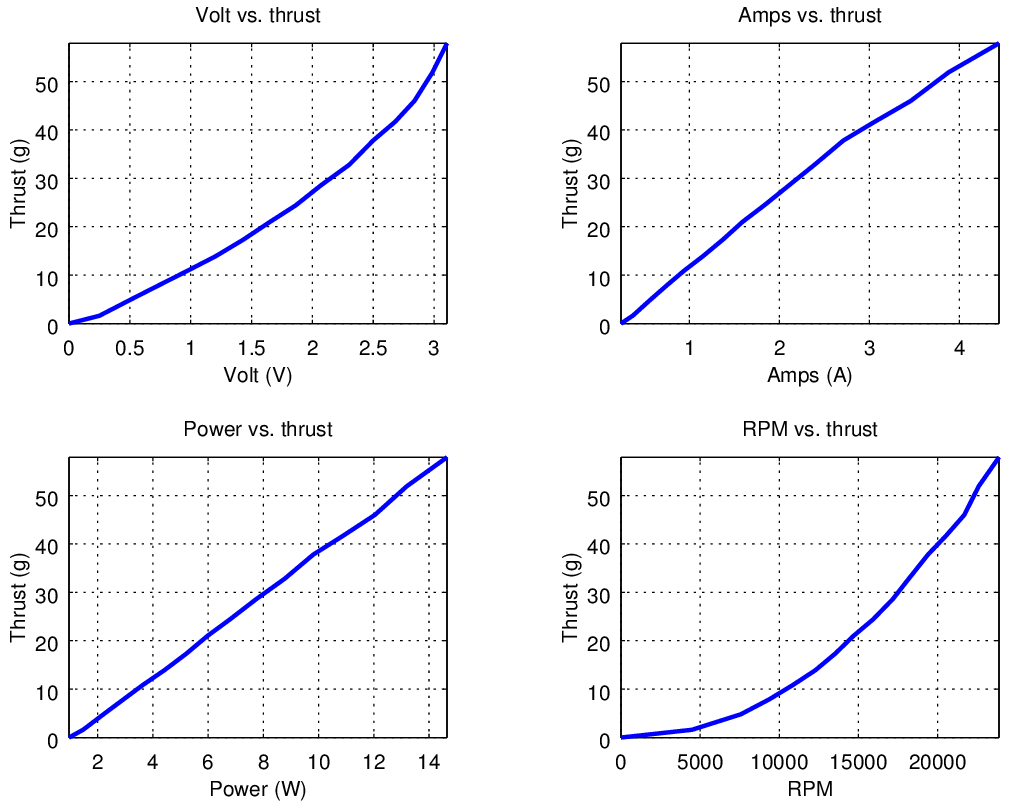
Das Verhältnis zwischen Drehzahl und erzeugtem Schub (und damit Bewegung des Quadcopters) ist aber nicht linear sondern annähernd exponentiell.
Schub = (ungefähr) Drehzahl Propeller 2
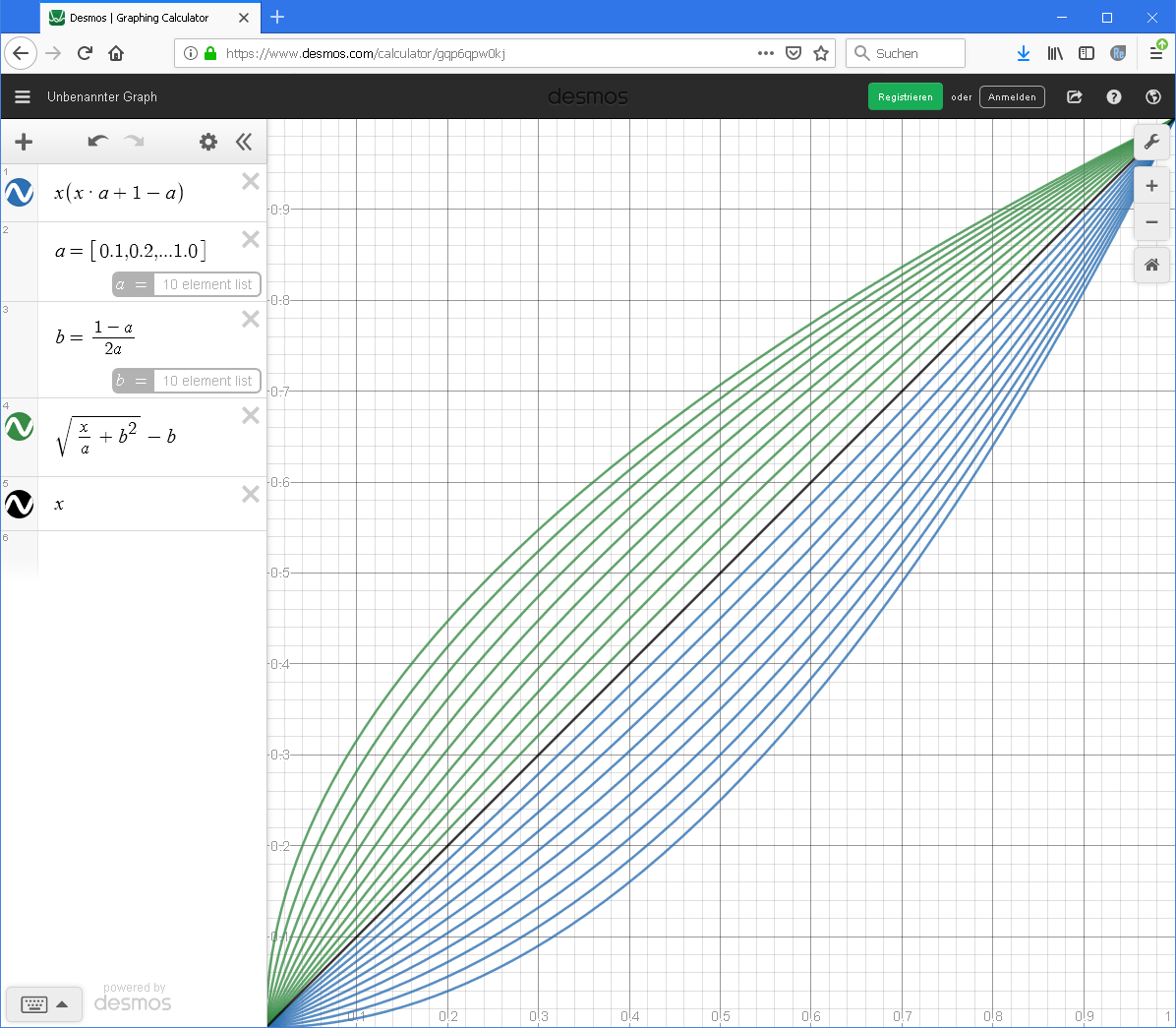
Misst man bei vielen Motoren das Spannung- vs. Schub-Verhältnis so kommt man auf die hier gezeigten blauen Kurven. Invertiert man diese Kurven (grün) und legt sie über den PID-Controller linearisiert man das Verhältnis zwischen PIDs und Schub. Dadurch kann der Flightcontroller genauer bei hohen und niedrigen Drehzahlen steuern. Im Gegensatz zur TPA, welches nur den D-Term ab dem cutoff senkt, wirkt Thrust linear auf alle PIDs über den kompletten Throttle-Bereich. Es arbeitet ergänzend zu TPA und ist keine Alternative dazu, wie manche annehmen! Je höher Throttle ist, desto weniger ist Thrust linear aktiv. Thrust linear wird in % angegeben, d.h. bei 25 wird die Motorschubkurve zu 25% linearisiert.
Thrust Linear #
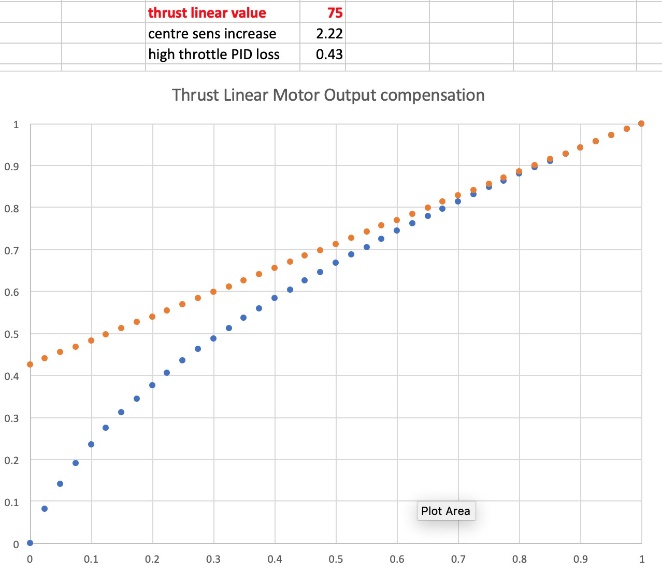
Thrust Linear 75: Kontrolle im bei Throttle Zentrum verbessert um 220% und verschlechtert im Max-Throttle-Bereich um 43%
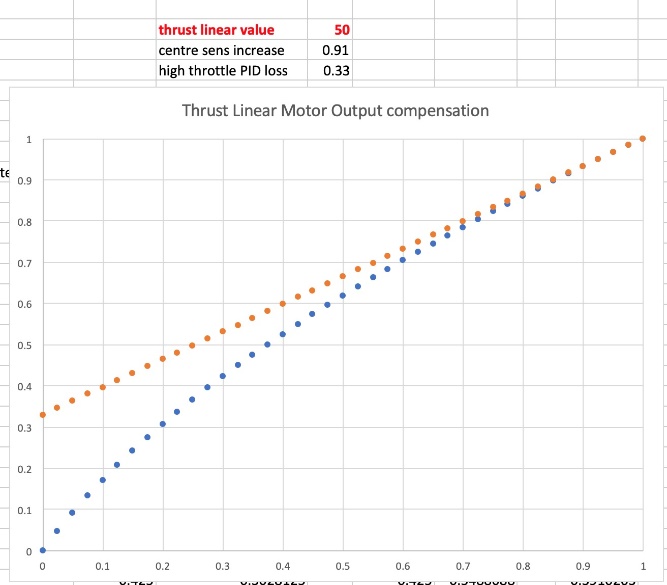
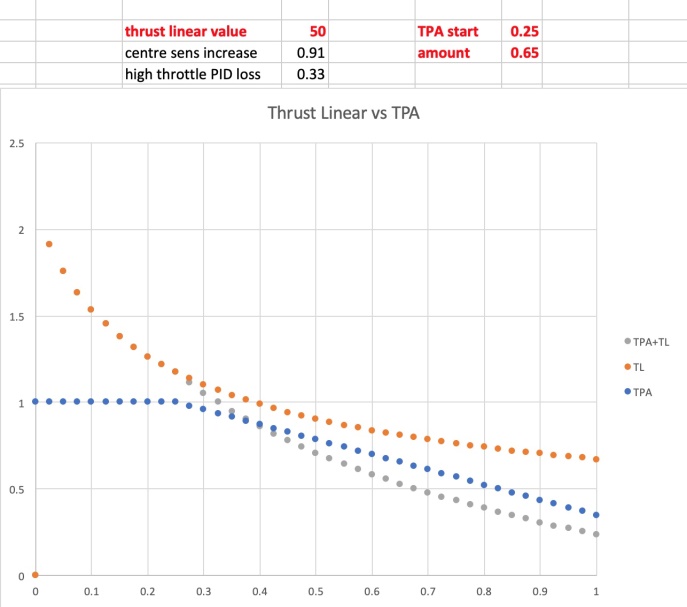
Thrust Linear 50: Kontrolle im bei Throttle Zentrum verbessert um 91% und verschlechtert im Max-Throttle-Bereich um 33%
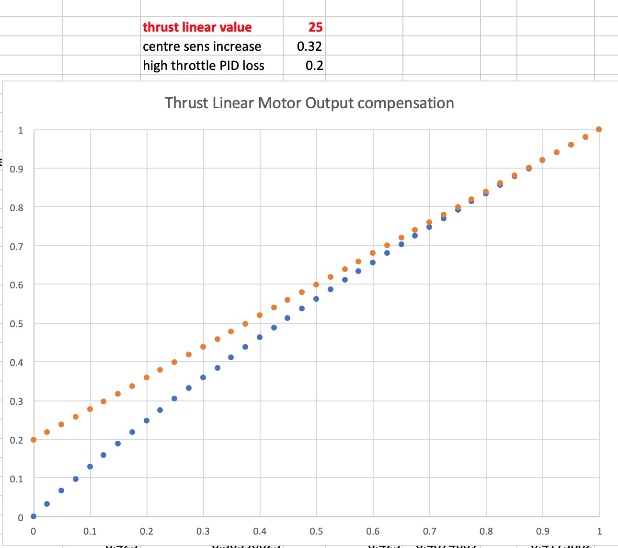
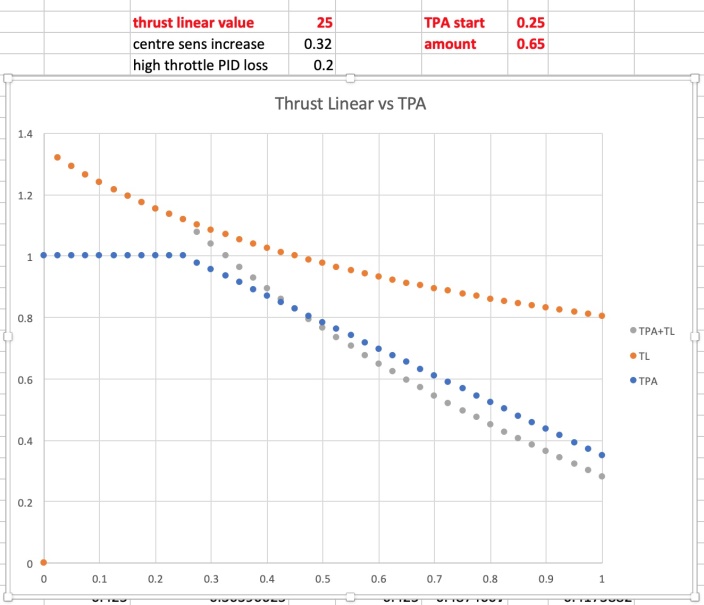
Thrust Linear 25: Kontrolle im bei Throttle Zentrum verbessert um 32% und verschlechtert im Max-Throttle-Bereich um 20%
Quelle https://www.rcgroups.com/forums/showpost.php?p=40714995&postcount=5378
Thrust Linear mit TPA #
Tuning #
Thrust Linearization wird nicht für Standard Quadcopter empfohlen. Für Quadcopter mit einem schlechtem Schub/Gewichtsverhältnis wie Whoops oder Xclass profitieren von Thrust Linearization.
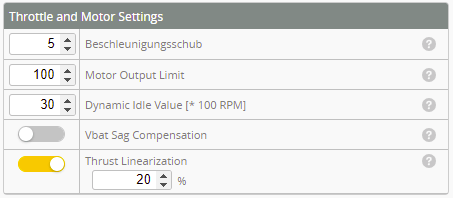
set thrust_linear = 30
geht für fast alle Quadcopter und ist empfehlenswert.
Höhere Werte wie 50 oder 75 sind eher was für Whoops die 48 kHz oder 96 kHz PWM im ESC einstellen um die fehlende Kraft zu kompensieren. Bei Cinewhoops sind die Nachteile des Kontrollverlustes bei hohem Throttle eher zu verkraften, da etwas schwimmende Bewegungen hier gewünscht sind. Daher ist Thrust linear hier auch schon in manchen Presets enthalten.