Kurvenanalyse #
Schaut Euch in Ruhe ein Log an ohne konkrete Probleme lösen zu wollen. Geht dazu systematisch vor. Sucht Euch in den verschiedenen Übersichten den Setpoint und verfolgt an Hand des Pictogramms des Quadcopters was der Quadcopter macht. Lernt in den Übersichten Overview, Roll-, Pitch- und Yaw- Details wie sich der Quadcopter dazu bewegt. Die korrespondieren Stick-Eingaben sieht man ebenfalls im Overview. Macht nun das gleiche mit dem Gyro-Trace (Kurve Gyro (nicht scaled im Debug mode)). Schaut Euch an wie die Motoren reagieren, wie sich die PID-Sum verhält und wie die PIDs in die PID-Sum reinspielen. Haltet euch die PID-Theorie vor Augen. Nehmt euch Zeit. Sowas lernt man nicht in ein zwei Stunden.
Es gibt keine Sollkurven „so muss das aussehen“. Jeder Quadcopter ist individuell und wird nach individuellen Zielsetzungen eingestellt. Ein gut fliegender nicht ans Limit getunter Quadcopter hat in den Kurven ein bestimmtes typisches Bild. Typische Merkmale in den Kurven treten immer wieder auf. Mit der Zeit lernt man auf diese Dinge zu achten, am Anfang oft durch Trail und Error. Je mehr man mit Blackbox Logs arbeitet desto versierter wird man. Versucht euch immer an die Theorie zurück zu erinnern und geht systematisch vor:
- Wo ist der Setpoint – was soll der Quadcopter machen?
- Wie reagieren die einzelnen PID-Werte: P, D, I, FF = PIDSum, PIDError?
- Reagieren die Motoren adäquat?
- Macht der Quadcopter die befohlene Bewegung (Gyro)?
Frequenzmessung/ Zeitmessung #
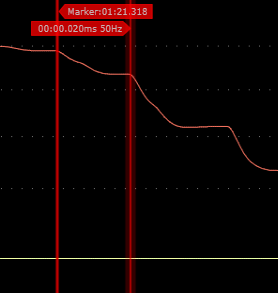
Um sich einzelne problematische Stellen genauer anzuschauen lohnt es sich die Frequenz oder den Zeitabstand von Schwingungen in Kurven zu messen. Im BBE zoomt man dazu an die entsprechende Kurve heran, bis man sie ausreichend hoch und breit dargestellt hat. Schiebt den Marker (roter Balken) nun auf den Gipfel einer Kurve. Anschließend drückt man [M] um sich den Marker zu speichern. Schiebt nun das Blackbox-Log bis zum nächsten Gipfel.
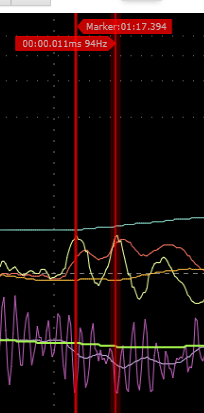
In dem Beispiel links sehen wir bei Prowash einen unregelmäßig oszillierenden D-Term (gelb) mit einer Frequenz von 94 Hz und einer Schwingungsdauer von 11 ms.
In dem Beispiel rechts sehen wir den RC Command roll (rot). Dieser hat Stufen mit einer Frequenz von 50 Hz. Da hier laut Log Header CRSF eingestellt ist liegt nahe, dass CRSF in diesem Moment im Mode 1, also 50 Hz sendete.
Zudem sieht man in der Legende zu jederzeit den Zahlenwert zu jeder Kurve in der entsprechenden Einheit (Grad/s; %; Volt; etc.).