Auf dem Flight-Controller liegen ein bis zwei Gyroskopchips.
https://www.memsjournal.com/2011/01/motion-sensing-in-the-iphone-4-mems-gyroscope.html
Diese messen die Lage des Quadcopters im Raum. Die Sensorik im Chip erzeugt ein Datenrauschen, welches Hintergrundrauschen, Messfehler, und verwertbare Daten enthält. Den Flightcontroller interessieren natürlich nur die echten Bewegungsdaten. Das Hintergrundrauschen und die Messfehler müssen herausgefiltert werden. Dazu wollen wir in unserer Anwendung zusätzlich störende Schwingungen (Mikrobewegungen z.B. durch die Motoren, sich biegende Arme, wackelnde Antennen oder GoPros) herausfiltern. Dies passiert in der ersten Stufe bereits auf Hardwareebene im Gyroskopchip selbst. Dieser hat programmierbare Filter, die wir nicht beeinflussen können. Das Gyro_Scaled Signal in der Blackbox ist also schon mal im Gyro selbst gefiltert worden!
Als nächstes durchläuft das Signal die Gyro-Filterung in Betaflight.
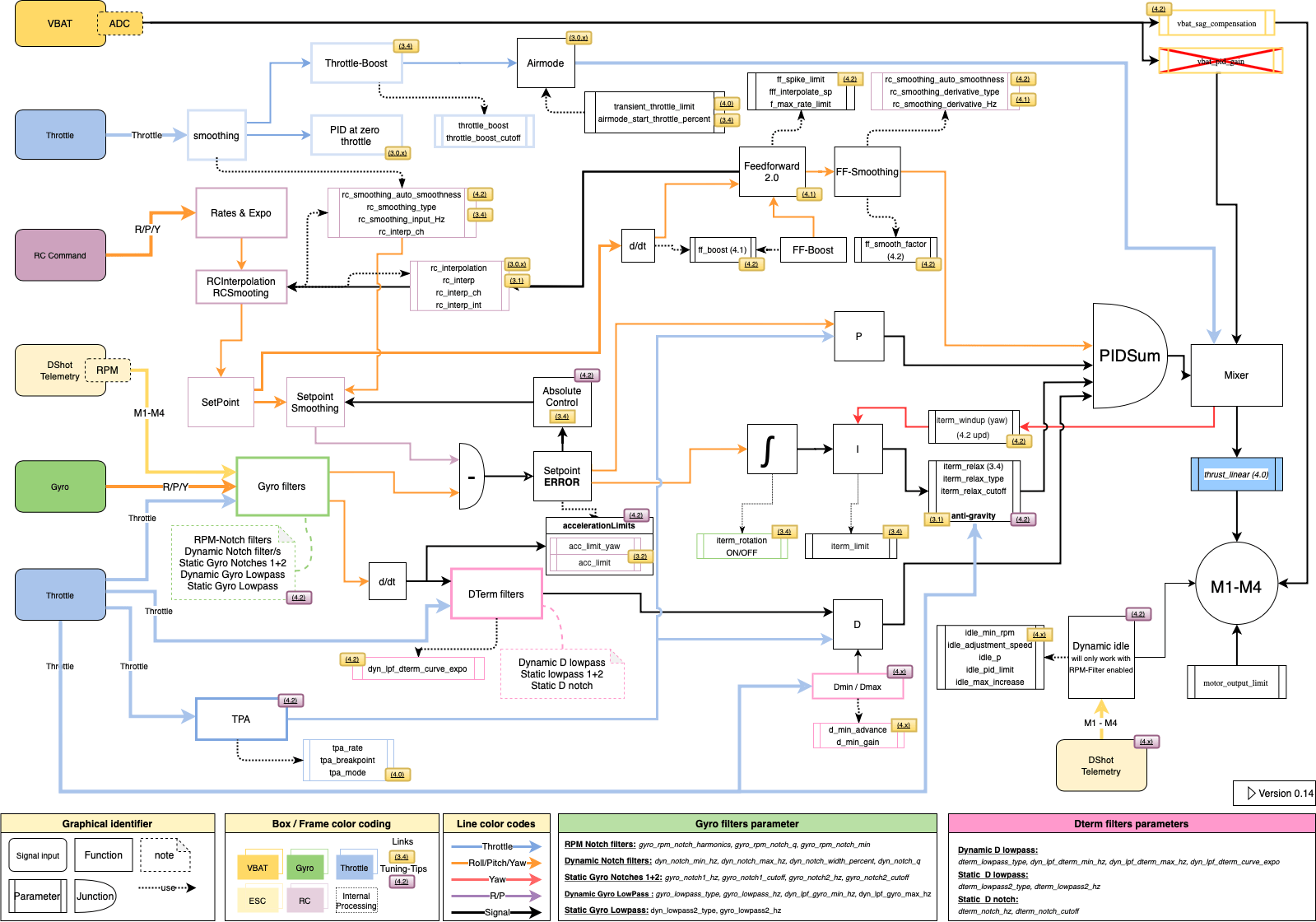
[Quelle: https://github.com/mrRobot62/betaflight_processing/blob/master/bf-4.2_processing-workflow.png]
Die Gyrofilter werden der Reihenfolge nach abgearbeitet und am Ende kommt das gefilterte Gyro-Signal heraus. In der Blackbox nur „GYRO“ genannt. Dies gibt uns die aktuelle Lage des Quadcopters in der Luft wieder (Ist-Zustand).
Ein gutes Gyro-Signal (Ist) ist Grundlage für einen guten Tune.