Als X-Class Build werden Quadcopter mit mindestens 800mm Motordiagonale klassifiziert. Beast-Class Builds sind Quadcopter mit 650mm Motordiagonale. Standard ist der Einsatz von 13 Zoll Propellern. Es gibt auf die Möglichkeit 8 Motoren als Octocopter zu fliegen. Dies wird meist bei Cineliftern, also Copter die große Kameras tragen und schnelle FPV Manöver ermöglichen sollen, eingesetzt. Als Firmware wird sowohl bei den Race-X-Class Quadcoptern als auch dynamischen Cineliftern Betaflight eingesetzt, da dies den Charme hat sich auf den individuellen Build sehr genau abstimmen zu lassen. Beim Aufbau und Tuning muss man allerdings einige Eckpunkte beachten.
Eigenheiten X-Class Builds #
X-Class Builds verwenden meist 13 Zoll Propeller mit ca. 1 Zoll Steigung an Motoren mit 300-400 KV bei 12S oder 550-700 KV bei 8S. Dies bedeutet, dass die Propeller deutlich langsamer drehen als Propeller eines 5 Zoll Quadcopters. Dies erzeugt Schwingungen am Quadcopter in deutlich tieferen Frequenzbereichen, als wir dies von 5-Zoll Quadcoptern gewohnt sind. Die Schwingungen sind sehr nahe am Frequenzbereich von Prop-Wash dran. Die Filterung muss hier optimal gesetzt werden um nicht im Prop-Wash-Bereich zu filtern, aber die störenden Schwingungen gut zu erfassen. Ein zweites Problem sind die hohen Ströme, die durch die Hardware geleitet werden. Mit active dampening werden beim Abbremsen der Propeller beim Richtungswechsel hohe Ströme induziert, die elektrische Störungen im Gyroskop oder VTX erzeugen können. Einerseits durch den Strom selbst, andererseits durch die Magnetfelder um die Kabel, die in nahegelegen Kabeln ebenfalls störende Ströme erzeugen können.
Bauplanung und Komponentenwahl #
Frame #
Um möglichst wenig Schwingungen zu übertragen sollte der Frame sehr steif sein. Durchgesetzt haben sich Carbon-Vierkant-Rohre mit mindestens 20x20mm Außenmaßen und 1mm Dicke. Diese sollten aus laminiertem Carbon-Verbundstoff bestehen, nicht aus extrudiertem. Vorsicht oft wird billiges extrudiertes Vierkantrohr mit einer schicht Carbongewebe umwickelt – schaut also in das Rohr hinein. Aluminium sollte deutlich dicker gewählt werden, ist aber 2. Wahl. Der Übergang zum Body des Quadcopters sollte großzügig ausgelegt werden, um Kräfte bei einem Crash gut zu verteilen. Verlängerungen der Top oder Bottom-Plate auf die Arme sind eher nicht zu empfehlen, da der Übergang Arm/Body als Sollbruchstelle im Crashfall wirken soll um weitere Schäden an der teuren Elektronik zu minimieren. Die Motoren sollten durch den Arm hindurch befestigt werden. Beim anbringen mit Schellen können die Motoren verrutschen.
Gute Beispiele sind der Tasmanian V2 von Catalyst MachineWorks oder Big Fu*kin Wedge von Rising Sun FPV.

Big Fu*kin Wedge 
Tazmanian V2

Elektronik #
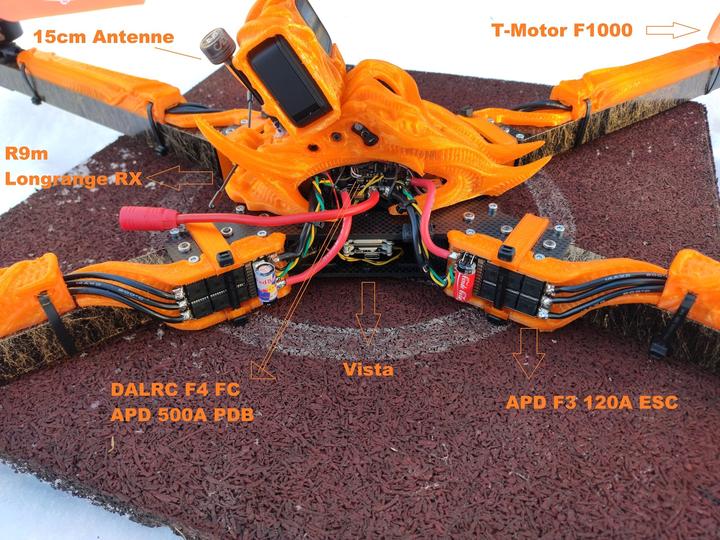
Wichtig sind wirklich gute ESCs. Klassiker sind die APD F3 120A ESCs, eine alternative sind Demon Power Systems DPS LS1 ESC 100Amp Lightning Shadow. Andere günstigere ESCs wie iFlight Succex haben Probleme und sind nicht zu empfehlen. Zu Flycolor ESCs fehlen schlichtweg die Erfahrungsberichte. Bidirectional DShot für RPM Filterung ist mittlerweile bei allen ESCs zu haben. Des Weiteren benötigt man ein potentes PDB um den Strom an die ESCs mit wenig Widerstand zu verteilen. Die Kabel zwischen ESC und PDB sollten möglichst kurz sein, je dicker desto besser. Wickelt das Kabel des Signal-GND um das Signalkabel (von FC zu PDB) um dieses vor elektrischen Störungen etwas abzuschirmen. Leitet das Signal und dessen GND Kabel nicht durch das PDB sondern lieber direkt zum FC. Die Länge der Kabel zwischen ESC und Motor ist eher unerheblich. Achtet auf ausreichende Kühlung. ESCs dieser Größe solltet ihr nicht in Schrumpfschlauch einschrumpfen. Heatsinks sind wiederum auch meist nicht nötig, nur wenn es Temperaturprobleme gibt. Kondensatoren werden zu den ESCs mitgeliefert, jedoch empfiehlt es sich weitere 2000-4000uF Kapazität an den ESCs oder am PDB einzuplanen um die Spannungsspitzen zu schlucken.
Beim Flightcontroller gibt es nichts Spezielles zu beachten. Hier kann jeder beliebige Flightcontroller verwendet werden. Vor der Ära der RPM-Filterung wurden Radix FCs von BrainFPV empfohlen, da diese den Gryoskopchip der BMI-Reihe von Bosch verbaut haben. Dieser nimmt weniger Schwingungen im mittleren Frequenzbereich war und war früher für X-Class Builds von Vorteil. Allerdings ist dank RPM Filterung ein ICM Gyroskopchip mittlerweile von Vorteil. Die BMI160 haben mehr interne Filterung und Latenz, wodurch sie für unsere Zwecke die 2. Wahl sind. Zudem läuft bei den BrainFPV Radix Flightcontrollern Betaflight nicht direkt auf dem Prozessor sondern in einem eigenen Thread. Dies erhöht die Latenz, um wie viel kann allerdings nicht gemessen werden.
Eine weitere Möglichkeit um elektrische Störungen vom Gyroskop fernzuhalten ist das nutzen eines dedizierten Lipos für Flightcontroller, Receiver, VTX, Kamera, etc. Dies verringert die Wahrscheinlichkeit, dass elektrische Störungen zum Gyroskop gelangen. Leider ist ein common ground, also eine Verbindung zwischen GND des Flightcontrollers zum GND des PDB, nötig.
Je kürzer die Kabel, desto besser.
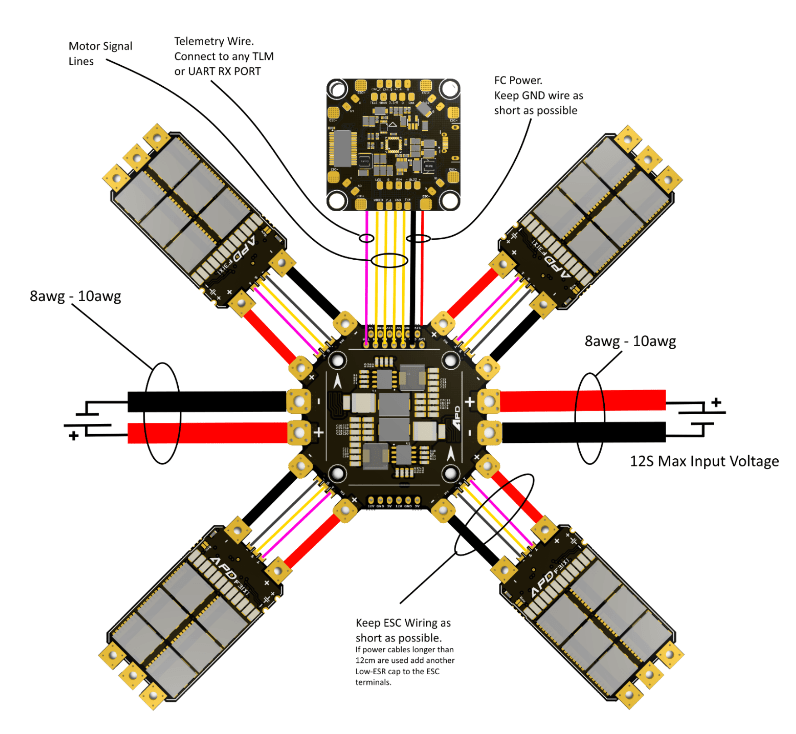
Entgegen des oben genannten Beispiels empfehle ich die Signal und Signal-GND Kabel direkt zum Flightcontroller zu legen und nicht durch das PDB. Je kürzer die Kabel und je weiter weg von den Hochstromkabeln desto besser.
Batteriewahl #
Viele nutzen zwei große 6S Akku mit 2000-6000 mah Kapazität parallel (1s2p). Diese sind teuer und für wenig andere Zwecke wieder verwendbar. Statt 2 Zellen in 2s1p Konfiguration zu verwenden würde ich eher raten 4 oder 6 normale Lipo-Akkus für 5 Zoll Quadcopter zu nutzen, die ihr eh schon rumliegen habt. Diese kann man dann in 2s2p bzw. 2s3p Konfiguration einsetzen. Dies hat den Vorteil, dass man nicht extra Akkus kaufen muss. Meist verkraften gute 6S-Akkus für 5 Zoll Quadcopter höhere Entladeraten, was die maximal verfügbare Stromstärke steigert und die Abnutzung an den Akkus vermindert. Montiert könnte dies so aussehen:
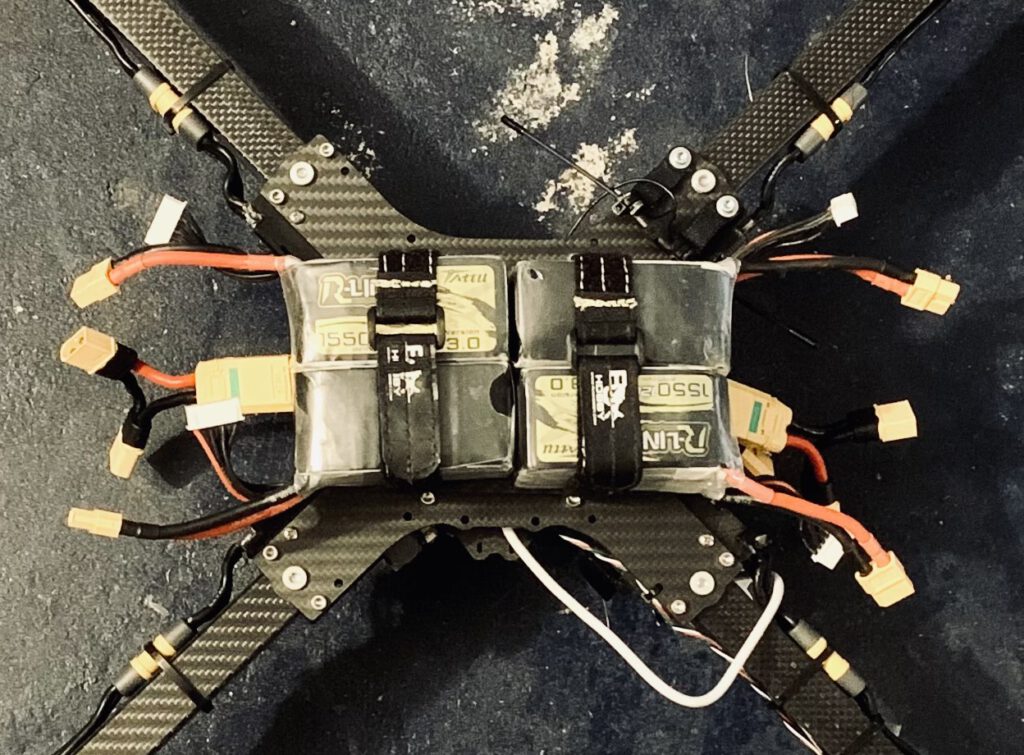
Wichtig: Nutzt Antispark-Plugs! In oben genanntem Beispiel werden zunächst die Adapter an den XT90S-Steckern abgezogen und die linken/ rechten 6S-Akkus mit den XT60-Steckern miteinander verbunden. Anschließend werden die XT90S-Stecker angesteckt. Über den Widerstand im Stecker werden die Kondensatoren langsam geladen, damit beim Anstecken kein hoher Strom fließt (und den Stecker thermisch beschädigt).
Ein weiterer Tipp sind die MR60 Stecker an den Motorkabeln. Diese sorgen dafür, dass sich bei einem Crash die Motorkabel vom ESC lösen können ohne den ESC zu beschädigen. Funktioniert, oft erprobt.
Als Motoren werden Größen um die 40mm Statordurchmesser und 25mm Statorhöhe empfohlen. Für 12S haben sich 400KV für 8S 700KV bewährt.
Propeller werden 13 Zoll aufgezogen. Die Steigung (Pitch) beträgt meist 1 Zoll. Alle größeren Hersteller haben hier etwas im Angebot.
Tuning-Hinweise #
Ein X-Class Quadcopter sollte nicht der erste Quadcopter sein, den ihr tunt. Für den Maidenflug sollten die Filter maximal eingestellt werden. Lowpass 1 und 2 sollten sowohl unter Gyro als auch D-Term-Filterung auf BiQuad und 40hz unterer Cut-off gestellt werden. Bei den PIDs würde ich empfehlen ganz niedrig anzufangen. P/I/D auf 20-10-10. Schaut nun zunächst ob der Quadcopter abhebt und sich halbwegs stabil in der Luft hält. Fertigt ein kleines Blackbox-Log an und schaut ob größere Probleme zu sehen sind. Oft kann man die Filterung drastisch reduzieren.
Orientiert euch nicht an den Betaflight-Defaults. Diese sind für 5 Zoll Quadcopter gedacht und können nicht auf solche Builds angewendet werden.
Nutzt wenn möglich RPM-Filterung. Ein Großteil der Störungen lassen sich so herausfiltern und starke, latenzreiche Lowpassfilter sind meist nicht notwendig.