Drehraten #
PID-ControllerDie Rates, zu Deutsch Drehraten, geben an bei wie viel Grad Neigung des Sticks an der Funkfernbedienung sich der Quadcopter wie schnell dreht (Grad pro Sekunde). Sie definieren wie euer Quadcopter sich anfühlt. Bisher haben wir eingestellt wie gut der Quadcopter seine eigene Position erfasst (Filtertuning) und wie gut er euren Befehlen folgt (PID-Controller).
Welchen Rate Mode Ihr nutzt ist Geschmackssache. Ich empfehle Actual Rates da hier die Center Sensitivity und die maximale Drehrate getrennt eingestellt werden kann. Einen Rechner um die alten Betaflight Rates in Actual Rates umzurechnen gibt es dazu hier.

Nun zum Fluggefühl, wichtig sind drei Aspekte:
1) Center Sensitivity: Die Sensitivität im Zentrum. Um durch Gates und Gaps zu Zielen muss der Quadcopter präzise gesteuert werden können. Der Eine ist sehr feinmotorisch veranlagt und in der Lage die Sticks sehr präzise zu steuern. Er kommt mit weniger Center-Senitivity aus. Andere sind eher grobmotorisch und brauchen eine hohe Center Sensitivity.
- ca. 50 – Cinematische Flüge, Präzisionsflüge, innerhalb geschlossener Räume
- ca. 100 – Freestyle
- ca. 200 – Racing, Line of Sight, dynamischer Freestyle
2) Verschiedene Piloten wollen verschiedene maximale Drehraten bei vollem Stickausschlag (Stick-Deflection).
- ca. 500 – Racing, cinematische Flüge
- ca. 700 – Freestyle
- ca. 1000 – dynamischer Freestyle, Line of Sight
3) Der Übergang zwischen dem Center und der full stick deflection. (Expo)
Rates geben maßgeblich vor wie euer Quadcopter sich anfühlt. Jeder Pilot mag eigene Rates. Nutzt am Anfang die Möglichkeit und legt verschiedene Rate-Profile an und wechselt im OSD zwischen diesen hin und her. So werdet Ihr „Eure perfekten“ Rates finden. Probiert auch als Fortgeschrittene oder Profis neue Rates aus. Mit dem Können ändern sich auch die Vorlieben. Viele Piloten ändern ständig Ihre Rates, da Sie die Abwechslung mögen. Oder ihr fliegt die Rates eurer Vorbilder. MinChan Kim, Headsup, Vanover oder ihr kommt in die Gemeinde der „Opas“ und fliegt wie CTZsnooze.
RC Smoothing #
RC Smoothing wurde mit Betaflight 4.3 massiv überarbeitet. Die optimalen Einstellungen wählt ihr bei den Presets passend zu eurer Hardware und dem Einsatzzweck aus.
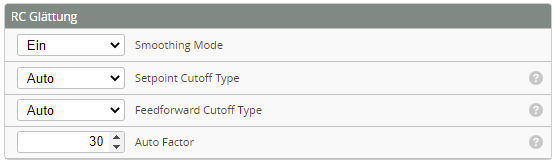
RC Smoothing muss eingeschaltet werden. Die Auto-Funktionen sind am besten. Wichtig ist eine konstante Sendefrequenz an der Funkfernsteuerung einzustellen. Lasst also die Finger von Crossfires dynamic mode, der ständig zwischen 50 Hz und 150 Hz hin und her springt. Wir stellen eigentlich nur den „Auto Factor“ ein. Je höher, desto glatter wird das RC-Signal aus dem der Setpoint berechnet wird. Je höher desto flüssiger, jedoch erzeugen höhere Werte auch mehr Delay. RC Smoothing ist hauptsächlich dafür verantwortlich wie „twitchy“ sich der Quadcopter anfühlt. Werte wie 20: unruhiger Kampfklaus, Werte wie 120: fliegendes Sofa.
- 20-25: Racing
- 30: Default, Freestyle
- 50: Cinematischen Fliegen
- 90: Mountain Surfung, ruhiges Cruisen
- 120: Merkbares Delay aber urgemütlich
Funkfernsteuerungen von niedriger Qualität, abgenutzten Gimbals, oder Piloten mit zittrigen Händen sollten eher leicht höhere Werte nutzen. Schaut auch mal ins Blackbox Log. Ist der Setpoint eher unruhig einfach mal das Smoothing leicht erhöhen.
Throttle-Expo #
Fortgeschrittene Race-Piloten benötigen über einen mittleren Bereich eine feinfülige Gaskontrolle. Die maximale Throttle-Position wird eher selten erreicht. Oftmals ist es schwer den Gashebel in diesem mittleren Bereich den Gashebel feinfühlig zu steuern. Hier kann Gas Expo (Throttle Expo) helfen. Schaut euch in einem typischen Log an in welchem Bereich ihr hauptsächlich den Gashebel bewegt. Setzt hier den Gasmittelwert und fügt eine Portion Expo hinzu.
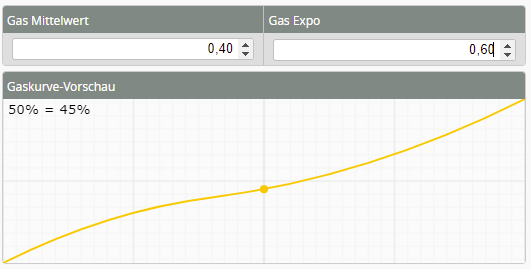
In der Grafik könnt ihr bei verbundener Funkfernbedienung direkt sehen wie sich der Gashebel nun verhält. Die Auflösung des Gashebels wird in dem häufig genutzten Bereich größer und ihr verliert nicht die Möglichkeit maximal zu Beschleunigen.
Ob der Einsatz von Throttle Expo zu empfehlen ist oder ihr lieber eine lineare Beziehung zwischen Gashebelstellung und Throttle nutzen wollt ist heftig umstritten. Gegenargumente sind, dass nicht immer der Hover-Point konstant ist, sondern mit abnehmender Akkuladung nach oben wandert. Des Weiteren werden beim Racing die Kurven mit recht hoher Gashebelstellung gefolgen. Wenn der Mid-Point zu niedrig gewählt ist verliert man hier sogar Kontrolle. Eine eindeutige Empfehlung Throttle Expo zu nutzen gibt es also nicht.
Von einem Gas-Limit (Throttle Limit) wird eher abgeraten. Ja hier schneidet man die höheren Gashebelstellungen weg und vergrößert die Auflösung im restlichen Bereich, aber man verliert die Möglichkeit maximal zu beschleunigen. Die Motoren können zwar, wenn vom PID-Controller verlangt bis 100% aufdrehen, ihr könnt das mit dem Gashebel aber nicht mehr befehlen. Wenn ihr dies nutzen wollt, nutzt den Modus „Skalierung“. Besser ist es beim nächsten mal Motoren mit einer etwas niedrigeren KV-Zahl zu wählen. Diese laufen effizienter als Motoren mit höherer KV-Zahl mit Gas-Limit. Diese Funktion ist Gedacht für Quadcopter die mit unterschiedlichen Akku-Typen betrieben werden (5S und 6S) und daher unterschiedliche PID und Rate-Profile verwerden.
Anmerkung #
Eine kleine Anmerkung zu Rate Dynamics (Emuflight): Dynamische Rates legen einen PID-Controller über die Stickeingaben und können boostend oder glättend auf die Rates wirken. Die Rates sind also keine starre Kurve mehr sondern passen sich den Stickeingaben dynamisch an. Schnelle Änderungen werden geboostet, verwackelte Eingaben geglättet, bei scharfem Abbremsen kann ein Überschwingen erzeugt werden. Das Problem: wie bei jedem einfachen PID-Controller entsteht ein PID-Error (Latenz) sowie eine Berechnung, die Latenz erzeugt. Beim klassischen Flug-PID-Controller wird seit Jahren viel Energie in die Entwicklung gesteckt um die Latenz zu minimieren und hier soll auf einmal die Latenz von Vorteil sein? Nein, lieber habe ich keine vermeidbare extra Latenz und dafür eine starre Beziehung zwischen Stick-Auslenkung und Drehrate. Gegen verwackelte Eingaben hilft Konzentration und üben, üben, üben.
Danke an Chris Rosser, dass er eine Woche nach der deutlichen Erweiterung des Artikels die gleichen Inhalte auf Youtube zusammengestellt hat. Diese möchte ich euch natürlich nicht vorenthalten. Ignoriert die viele Werbung (es gibt bessere Frames).