ESC – Motor – Propeller Auswahl #
Den Drive-Train also ESC, Motor und Propeller richtig zu kombinieren ist ausschlaggebend für gute Flugeigenschaften. Es gibt problematische Konstellationen die Oszillationen oder Wobbles erzeugen, die man Partout nicht wegbekommt. Einmal Propeller getauscht und das Problem ist weg. Co-Faktor hier ist der Frame. Nutzt wenn möglich keine FCs mit AIO (integriertem PDB – Power Distribution Board) für Einzel-ESCs. Die elektromagnetischen Felder stören Gyroskop- und OSD-Chips auf dem FC. Ein einzelner 4in1-ESC ist hier besser. Wenn möglich solltet ihr auch den FC über ein BEC auf dem 4in1 betreiben. Klar dann muss der ESC Telemetrie und Current-sensing unterstützen damit euer Stromverbrauch im OSD (derzeit nicht bei DJI FPV verfügbar) angezeigt wird. Ein Kondensator am ESC ist Pflicht! Ein zusätzlicher Kondensator auf der 5V Rail des FC kann bei Noise-Problemen im niedrigen D-Term-Bereich helfen.
ESC #
Grundsätzlich gibt es Einzel-ESCs welche eigentlich nur noch in der Beast- und X-Class Anwendung finden. 4in1-ESCs machen die Verkabelung deutlich einfacher und sauberer. Ich kann einen großen, statt 4 kleiner Kondensatoren nutzen, außerdem leite ich nicht die gesamte Lipo-Spannung durch das Power Distribution Boards (PDB) des FC. Wenn Ihr schon Einzel-ESCs verbaut, dann nutzt auch ein einzelnes PDB (also ohne FC) und schraubt den FC darüber.
Schaut das euer ESC BLHeli_32 oder BLHeli_S unterstützt. Ältere BLHeli (ohne 32 oder S) sind obsolet. Ausnahme bildet die APD F-Serie für X-Class mit hauseigener Firmware, welche auch bidirectional DShot als Betaversion unterstützt.
Das Power-Rating, also wie viele Ampere (Stromstärke) der ESC (bei 4in1 jeder einzelne der ESCs auf der 4in1 Platine) zeigt euch welcher Motor hierzu passt. Die „mean sustainable current“ also Stromstärke die dauerhaft gehalten werden kann sollte mehr als die Leistungsanforderung eures Motors bei 90% Throttle sein. Die „burst current“ also maximale Stromstärke die für 10 Sekunden gehalten werden kann sollte über der Leistungsanforderung des Motors bei 100% Throttle liegen.
Schauen wir uns als Beispiel das Datenblatt des T-Motor F60 Pro IV 1950KV für 6S an:
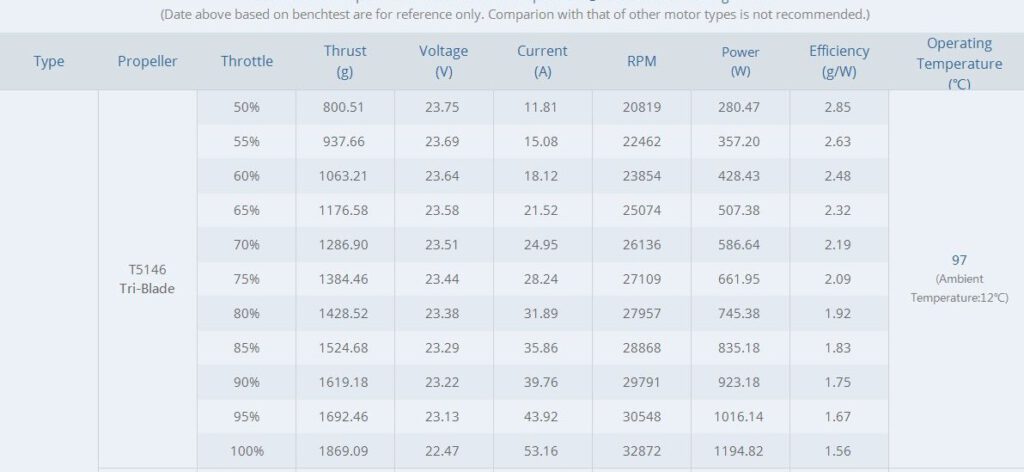
Gepaart wird der Motor in diesem Beispiel mit 5.1×4.6×3 Propeller. Das ist zwar ziemlich viel Pitch, meist wird man eher 3.8 – 4.2 Pitch wählen, aber mehr Pitch bedeutet auch mehr Stromverbrauch. Wir sind also auf der sicheren Seite. Man sieht, dass der Motor bei 90% Throttle schon knapp 40A Stromstärke benötigt. Gibt man Vollgas etwas über 53A. Optimalerweise sollte man also einen ESC mit mindestens 55A peak current und 40A continuous current Fähigkeit wählen. Höheres Amp-Rating am ESC ist kein Problem, kostet aber mehr Geld.
ESCs haben jeweils einen eigenen Mikroprozessor. Verwendet werden meist F0 oder F3 Prozessoren. Wenn ein F3 Prozessor verfügbar ist, ist der zu bevorzugen, da hier elektromagnetische Störungen mit leistungsfähigerer Filterung besser verarbeitet werden. Ein ausreichend großer Kondensator ist Pflicht! Immer!
Ab 80A Stromstärke aufwärts kann man eigentlich nur noch APD Produkte empfehlen. Etwas anderes wird in der XClass-Szene nicht geflogen. Bidirectional DShot ist hier in Entwicklung und teilweise schon verfügbar.
Motoren #
Es gibt viel unsachliche Diskussion über Motoren. Oftmals kommen günstige Budget- und teure Premium-Motoren aus dem gleichen Werk in China und sind fast baugleich. Motoren mit Namenbranding würde ich meiden, da hier meist mittelklassige Motoren zu Premium-Preisen verkauft werden. Mittlere Preisklasse ist meist völlig ausreichend, nur absolute Top-Racer „brauchen“ High-End-Motoren.
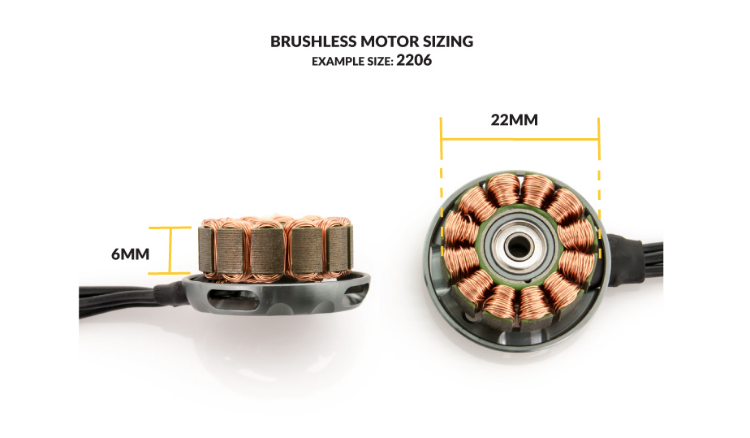
Ein Motor wird klassifiziert nach Stator-Größe und KV. Die Statorgröße z.B. 2206 beschreibt den Durchmesser (22mm) und die Höhe (06mm) des Stators. Je größer das Volumen (Volumen = Höhe x Durchmesser) desto mehr Drehmoment (Kraft) kann der Motor erzeugen. Ein höherer Stator erreicht bei höheren Drehzahlen mehr Drehmoment, hat aber weniger Throttle-Auflösung bei niedrigen Drehzahlen. Ein breiterer Stator hat bei niedrigerer Drehzahl mehr Drehmoment, hat aber weniger Throttle-Auflösung bei hohen Drehzahlen. Vereinfacht:
Hoher Motor = mehr Drehmoment bei hoher Drehzahl – Racing
Breiter Motor = mehr Drehmoment bei niedriger Drehzahl – Freestyle
Die Motor-KV-Zahl beschreibt die Spannung, die durch die Drehung des Motors in den Spulen erzeugt wird. (Nicht anders herum und nein, das ist nicht das Selbe!) Drehe ich den Motor an seiner Glocke mit 1900 Umdrehungen pro Minute so wird er bei einer KV von 1900 genau 1V Spannung erzeugt. KV = back EMF constant:
https://en.wikipedia.org/wiki/Motor_constants#Motor_velocity_constant,_back_EMF_constant
Genau genommen ist die Aussage 1V Spannung erzeugt bei einem 1900KV Motor 1900 Umdrehungen pro Minute nicht korrekt, aber vereinfacht durchaus anwendbar. Je höher die KV-Zahl desto schneller dreht der Motor bei einer gegebenen Spannung. Jeder Motor hat ein Datenblatt, dass den maximalen Stromverbrauch (Ampere angibt). Bei der Auswahl des ESCs sollte dieser etwas mehr Stromstärke (Ampere) liefern können, als der Motor verbraucht, siehe oben. Ist der Motor zu groß ist der Stromverbrauch unnötig hoch. Ist der Motor zu klein wird er bei schnellen Manövern nicht die nötige Schubkraft bringen können und „ausmaxen“.
Wichtig ist die richtige Größe und KV für euren Anwendungszweck. Schaut euch unbedingt das Datenblatt an. Gute Hersteller verraten Euch dort bei welchen Propellern die Motoren wie viel Stromstärke (Ampere) benötigten. Natürlich kann ein Akku nur eine bestimmte Menge Strom liefern, aber diese (z.B.: 120A bei 120C 1000mah) teilt sich nicht immer konstant durch 4 für alle 4 Motoren. Es gibt nicht wenige Flugsituationen in denen ein Motor 100% ausgelastet wird und die anderen Motoren bei 0% idlen. Hier kann bei falscher Abstimmung schon mal ein ESC wegen Überlastung durchbrennen (engl.: pop an esc).
Objektive Daten findet Ihr auf https://www.miniquadtestbench.com/.
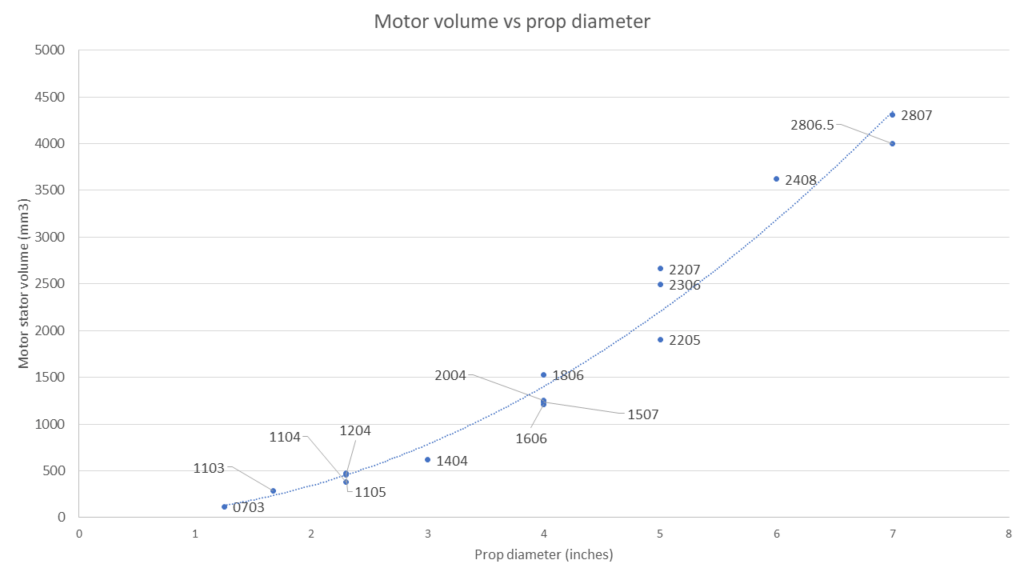
In dieser Übersicht findet ihr typische Motorgrößen mit den dazu meist eingesetzten Propellergrößen.
Weiterführende Infos hier: https://oscarliang.com/quadcopter-motor-propeller/
Props #

Der Durchmesser wird in Zoll angegeben und meistens zusammen mit dem Pitch, der Neigung des Blattes (engl.: Blade), als Teil einer vierstelligen Zahl angegeben. Der Pitch beschreibt die Distanz die der Propeller sich, durch die Neigung der Blätter, pro Umdrehung im Raum fortbewegt, wenn kein Widerstand vorliegt.
Beispiel: „Gemfan 6030 Plastik Propeller“. Hier handelt es sich um einen 6,0 Zoll Propeller der Marke Gemfan mit einer Neigung (Pitch) von 3,0 Zoll. Bei einer vollen Umdrehung schiebt sich der Propeller (ohne Anziehungskraft der Erde und Luftwiederstand) 3 Zoll im Raum voran. Eine Andere Angabe ist z.B.: HQ 5.1×4.3×3. Dies bedeutet: Hersteller HQProps; 5,1 Zoll Durchmesser; 4,3 Zoll Neigung; 3 Blätter (Blades). Das es CW (clock wise) und CCW (counter clock wise) Propeller gibt wissen hoffentlich alle. Jeder hat die schon mal verkehrt aufgeschraubt und einen ausflippenden Quadcopter erlebt.
Die meisten Motorenhersteller stellen eine Tabelle zur Verfügung, auf welcher sie angeben welche Neigung bei Propellern welchen Durchmessers und welcher Marke am besten für den jeweiligen Motor geeignet sind. Eine höhere Neigung (Pitch) erhöht in der Regel den Stromverbrauch, wodurch eine kürzere Flugzeit pro Akku zu erwarten ist. Gleichzeitig verstärkt sich jedoch die Schubkraft und damit erhöhen sich Geschwindigkeit und Agilität. Wichtig ist Akku und Motor nicht zu überlasten. Ein voller Akku sollte einen Punch-out über eine gute Sekunde schaffen ohne unter 3,7V Zellspannung zu fallen. Schafft er das nicht solltet Ihr Props mit weniger Pitch verwenden, oder größere Akkus und/oder Akkus mit höherer Entladerate (C-Rating).
Für Racing und schnellen Freestyle haben sich Triblade Propeller durchgesetzt. Biblades, also Propeller mit 2 Blättern, sind für Long-Range geeignet.
Spezialfall Bullnose (BN): Diese sind eigentlich größere Propeller, deren Spitze „abgeschnitten“ wurde. Beispielsweise ist ein 5045 BN Propeller gleich geformt wie ein 6045 Propeller, ihm fehlt jedoch die Spitze. Ein Bullnose Propeller hat also eine größere Fläche als ein normaler Propeller gleichen Durchmessers, was die Schubkraft weiter erhöht. Da die Spitze fehlt, ist der Propeller jedoch weniger aerodynamisch, wodurch es zu verstärkten Luft Verwirbelungen kommt, welche den Propeller ausbremsen. Die Folge ist, dass Bullnose Propeller mehr Schubkraft liefern, aber eine geminderte Energieeffizienz haben – sie verbrauchen also deutlich mehr Akkuleistung.

Spezialfall ducted props (Mantelpropeller): Diese werden bei Cinewhoops mit Ducts, nicht Prop-Guards – Ducts! – eingesetzt und haben eine speziell hierfür angepasste Form. Ihre spezielle Form erlaubt eine möglichst kleine Air-Gap (Luftspalt zwischen Propellerspitze und Duct). Bei üblichen Cinewhoops ist der theoretische Performancegewinn nicht messbar. Hierzu muss man die Ducts im 3D-Drucker passgenau drucken und dann den Propeller schleifend verbauen. Anschließend dreht man den Propeller solange, bis er das Material des Ducts soweit weggeschliffen hat das er frei dreht. Dies macht eigentlich nur der erste echte Cinewhoop Squirt von Andy Shen. Aber auch hier ist der Effekt sehr fraglich. Die Air-Gap muss unter 200 Mikrometer sein, damit der Effekt nach Berechnugen überhaupt zum Tragen kommt. Viel eher sind die Ducts selbst mit ihrer Eigenschaft den Luftstrom zu lenken und nach unten zu kanalisieren für die einzigartigen Flugeigenschaften von Cinewhoops verantwortlich. Prop-Guards, also dünne Schutzringe um die Propeller herum haben, außer ihrem Gewicht, keinen relevanten Einfluss auf Flugeigenschaften.
Wollt ihr einen Quadcopter der seiner Zeit voraus ist? Die findet ihr auf http://www.shendrones.com/.
Welches Material? Es gibt nur noch Plastikmischungen. Jeder Hersteller hält seine geheim. Carbon hat in der X-Class noch einen gewissen Stellenwert, aber auch dort verschwindet Carbon zusehends.
POPO Schnellverschlüsse für Propeller sind ein nettes Gimmick, man braucht aber passende Propeller, was die Auswahl einschränkt. Es bringt keinen messbaren Vorteil.
Folding Props kommen gerade neu auf den Markt und scheinen vielversprechend zu sein. Sie werden sicher ihren Anwendungsbereich finden.
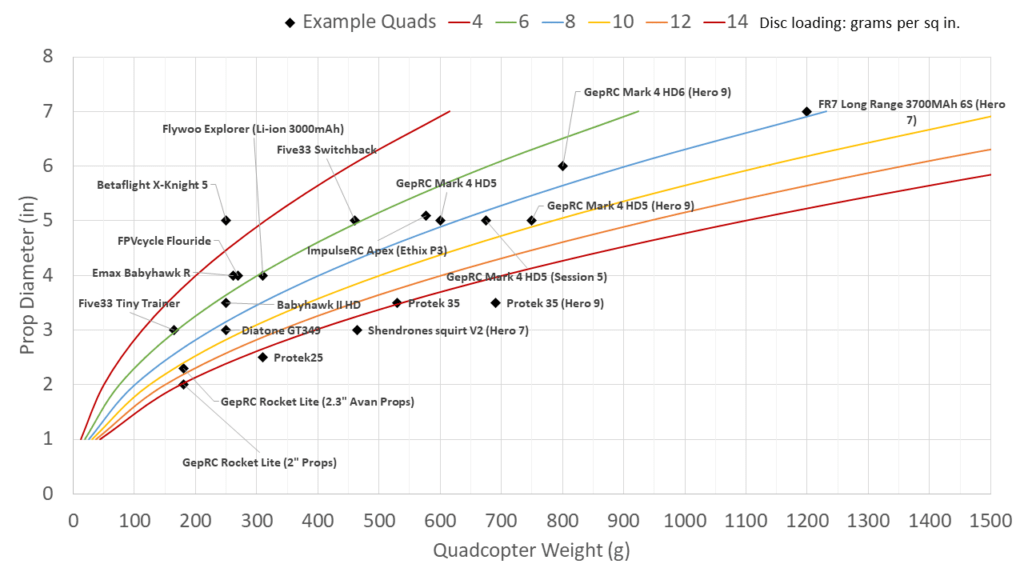
Welche Propeller nehme ich den nun? Anbei eine Graphik von Bind and Fly Modellen mit deren Gewicht und Propeller-Größe. Der zu beachtende Faktor ist das Disc-Loading, also wie viel Schub entwickelt der Propeller mit seiner Oberfläche. Ist der Propeller zu groß (Sub 250g 5 Zoll Build) oder zu klein (Cinewhoop) werden die Flugeigenschaften nicht optimal sein. Der optimale Bereich ist für Racing also 450g Gesamtmasse mit 5 Zoll Propeller. Welches Modell? Kauft eine Ladung verschiedener Propeller oder leiht euch welche von euren FPV Kollegen aus der Umgebung und probiert. Propeller sind Gefühlssache.
Hinweis: Propeller Muttern (Prop-Nuts) nicht im Baumarkt kaufen. Diese sind nicht für 45000 U/min ausgelegt. Kauft richtiges FPV-Zubehör. Beim Anziehen können Leute mit empfindlichen Händen einen Lipo-Strap um die Motorglocke wickeln um diese besser greifen zu können. Mit Motorzangen habe ich schon Leute Dellen in die Motorglocke drücken sehen.
Props-In vs. Props-Out #

Die Diskussion ist fast religiös. Es gibt viele Argumente für und gegen die eine oder andere Orientierung der Props. Wirklich durchgesetzt hat sich keine, also scheinen beide gleich gut zu sein. Hier einige Argumente:
1) Wo soll der Dreck den man mit den Props aufgabelt hinfliegen? In die Kamera (in) oder den FC (out)?
2) Wenn ich ein Gate/ Ast frontal erwische, soll der Prop den nach außen schieben (out) oder nach innen einhaken (in)?
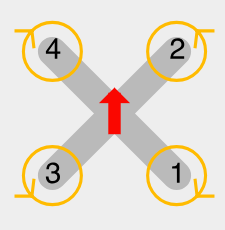
Es gibt auch ein flugphysikalisches Argument: Angenommen wir fliegen eine Linkskurve, dann nutzen wir einen gemischten Befehl aus: Yaw nach links, Roll nach links, Pitch nach hinten. Bei Props-In wollen wir also Schub der Motoren 3 und 2 (Yaw), 2 und 1 (Roll), 4 und 2 (Pitch). Bei Props-Out 1 und 4 (Yaw), 2 und 1 (Roll), 4 und 2 (Pitch). Bei Props-Out ist die geforderte Kraft gleichmäßiger verteilt (2x Motor 2, 4 und 1) als bei Props-In (3x Motor 2, 1x 1, 3 und 4). Bei Props-In heben sich die Kräfte teilweise auf da letztendlich alle Motoren hochdrehen und ein Teil der Schubumlenkwirkung verloren geht. Bei Props-Out kann Motor 3 bei aktiviertem Dynamic Idle in der Linkskurve unterstützen und bremsen.
Props-Out ist besser. (Change my mind…)